本学习基于金沙滩电子科技http://www.kingst.org ,并且有江科大的一些知识补充
需要的软件

 | 软件下载链接 |
|---|
介绍
单片机,英文Micro Controller Unit,简称MCU
内部集成了CPU、RAM、ROM、定时器、中断系统、通讯接口等一系列电脑的常用硬件功能
单片机的任务是信息采集 (依靠传感器)、处理 (依靠CPU) 和硬件设备 (例如电机,LED等) 的控制
单片机跟计算机相比,单片机算是一个袖珍版计算机,一个芯片就能构成完整的计算机系统。但在性能上,与计算机相差甚远,但单片机成本低、体积小、结构简单,在生活和工业控制领域大有所用同时,学习使用单片机是了解计算机原理与结构的最佳选择
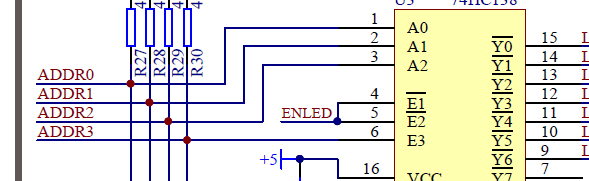
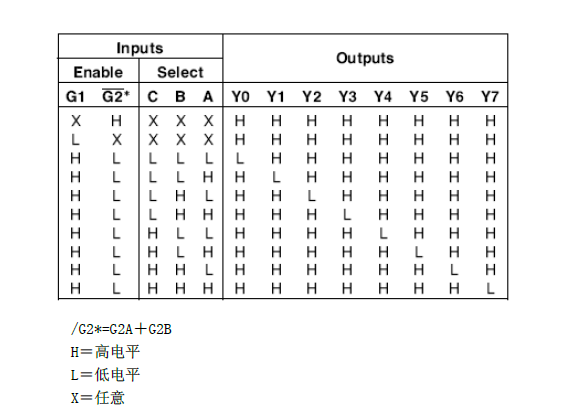
74HC138
38译码器
真值表

对应字母
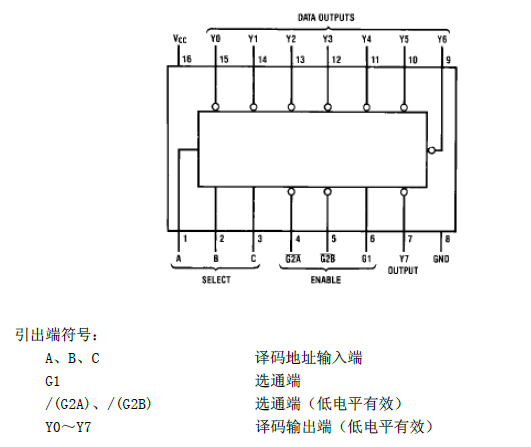 |  |  |
|---|
| C | B | A |
|---|---|---|
| ADDR2 | ADDR1 | ADDR0 |
| G2 | G1 | |
| ENLED | ADDR3 |
单片机的内部资源
- Flash——程序存储空间,早期单片机是OTPROM。
- RAM——数据存储空间。
- SFR——特殊功能寄存器。
LED
点亮第一个LED灯
第一课,点亮第一个电容,呸,LED灯
学习步骤
根据提供的资料看开发板的原理图,对应需要的端口
给对应的端口赋值(高电平,低电平)
- 单片机采用TTL电平技术
TTL电平信号规定,+5V等价于逻辑“1”,0V等价于逻辑“0”(采用二进制来表示数据时)。这样的数据通信及电平规定方式,被称做TTL(晶体管-晶体管逻辑电平)信号系统。
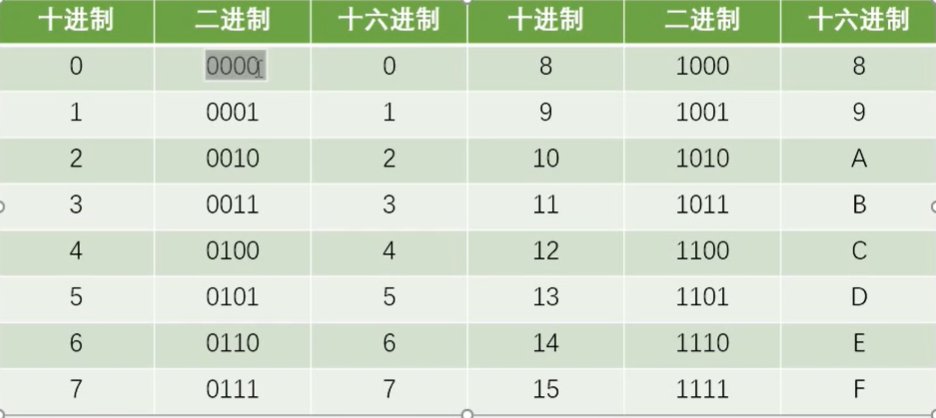
- 使用16进制进行赋值
 3. 下载hex到单片机
3. 下载hex到单片机
代码及演示
#include<reg52.h>
sbit LED = P0^0;
sbit ADDR0 = P1^0;
sbit ADDR1 = P1^1;
sbit ADDR2 = P1^2;
sbit ADDR3 = P1^3;
sbit ENLED = P1^4;
void main()
{
ENLED = 0;
ADDR3 = 1;
ADDR2 = 1;
ADDR1 = 1;
ADDR0 = 0;
LED = 0;
while(1);
}
LED闪烁
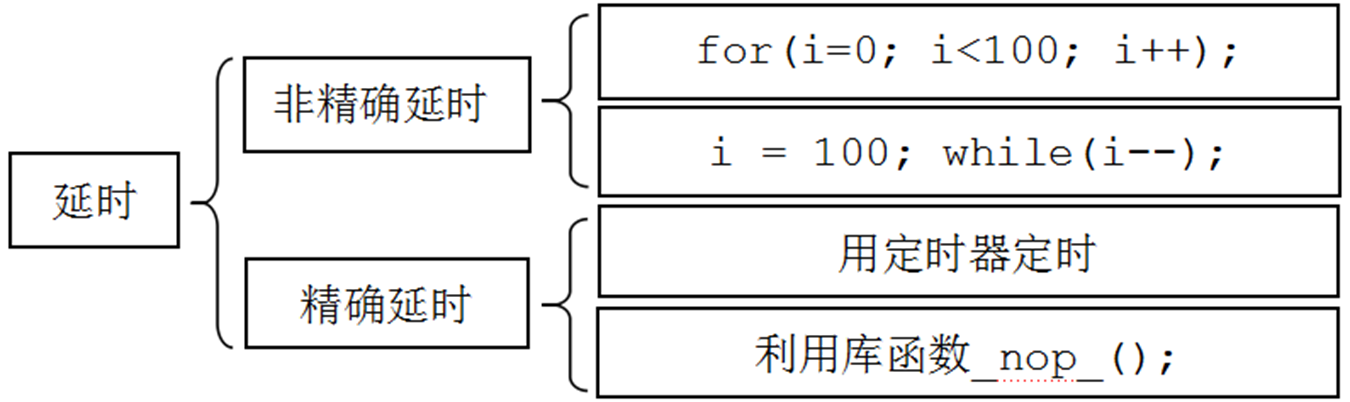
延时低于20ms,即频率小于50Hz人眼难以看出小灯的闪烁变化
延时
代码及演示
#include<reg52.h>
sbit LED = P0^0;
sbit ADDR0 = P1^0;
sbit ADDR1 = P1^1;
sbit ADDR2 = P1^2;
sbit ADDR3 = P1^3;
sbit ENLED = P1^4;
void main()
{
unsigned int i = 0; //定义一个无符号整形i
ENLED = 0;
ADDR3 = 1;
ADDR2 = 1;
ADDR1 = 1;
ADDR0 = 0;
while(1)
{
LED = 0;
for(i=0; i<30000; i++);
LED = 1;
for(i=0; i<30000; i++);
}
}
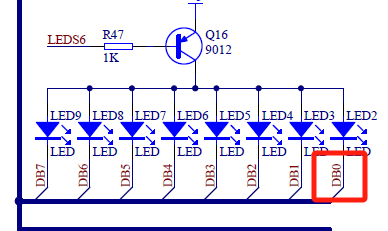
流水灯
前置知识
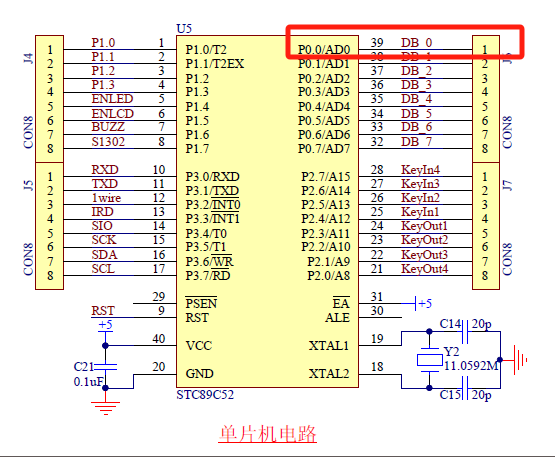
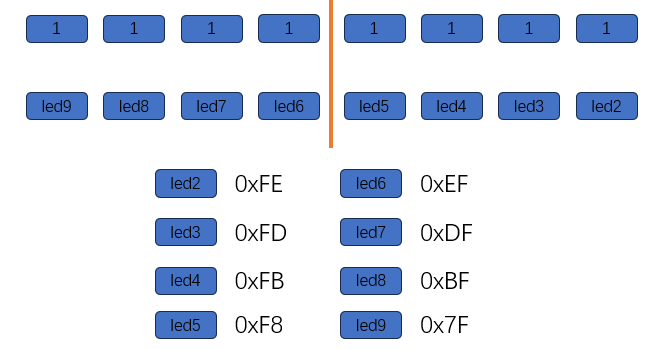
8个LED发光二极管,分别对应单片机IO口的P0.0到P0.7口,8个单片机IO口组成一个字节,在程序编写过程中,可以直接用P0来进行操作。
C语言的8位二进制数代表了8个IO口

16进制控制单个LED
C语言位运算
移位
各二进位全部左/右移若干位,高/低位丢弃,低/高位补0
左移 << 右移 >>
X<<1 X>>1
左移,最低位填0补充;右移,最高位填0补充
0xF0 1111 0000 1110 0000 0111 1000
取反
按位取反符号 ~
取反后1变成0,0变成1
0x0F取反后成为 0xF0,即0000 1111->1111 0000
代码及演示
#include<reg52.h>
sbit ADDR0 = P1^0;
sbit ADDR1 = P1^1;
sbit ADDR2 = P1^2;
sbit ADDR3 = P1^3;
sbit ENLED = P1^4;
void main()
{
unsigned char cnt = 0;
unsigned int i=0;
ENLED = 0;
ADDR3 = 1;
ADDR2 = 1;
ADDR1 = 1;
ADDR0 = 0;
while(1)
{
P0 = ~(0x01 <<cnt);
for(i=0; i<30000; i++);
cnt++;
if(cnt>=8)
{
cnt = 0;
}
}
}
定时器
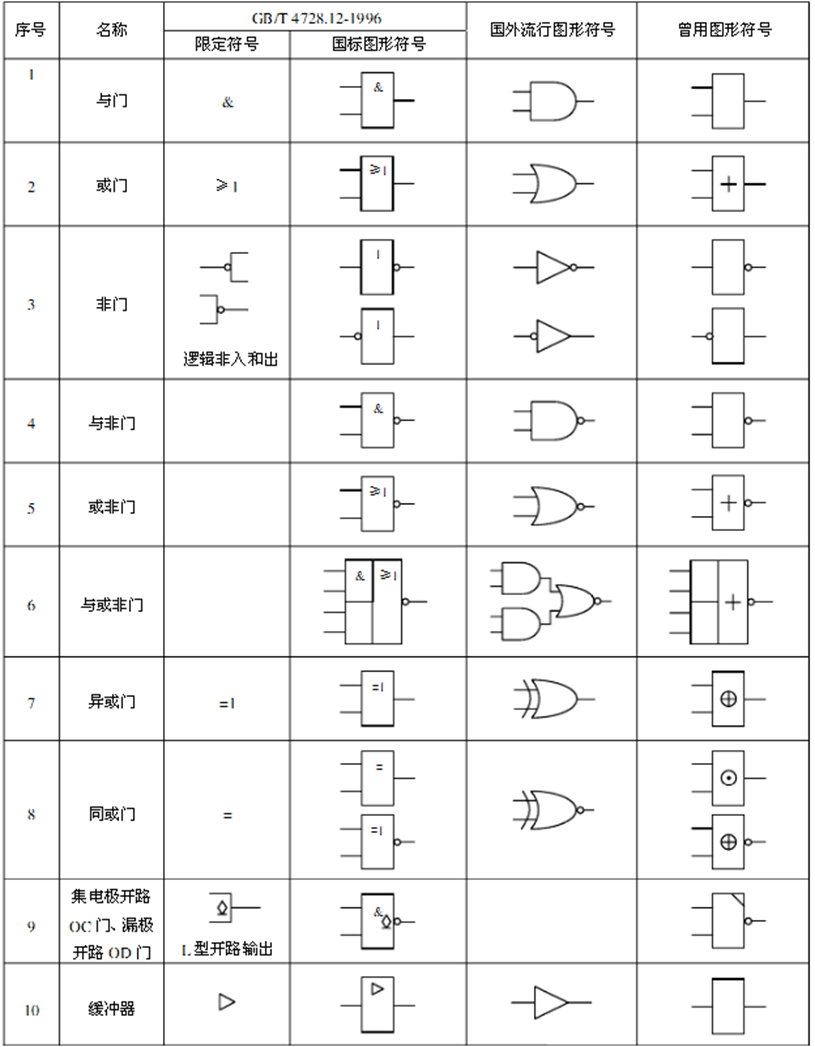
逻辑运算
前置知识
时钟周期:单片机时序中的最小单位,具体计算的方法就是时钟源分之一。
机器周期:我们的单片机完成一个操作的最短时间。
定时器:打开定时器后,定时器"存储寄存器"的值经过一个机器周期自动加1,也就是说,机器周期是定时器的计数周期。
定时器
TH/TL——定时器存储寄存器

计算方式
前提:
1. 频率:频率是单位时间内完成周期性变化的次数
2.一个时钟周期 = 12 个机器周期计算方式:
假设我们单片机的晶振是11.0592MHz,那么一秒钟可产生的机器周期数 11.0592MHz / 12 = 921600 个,
如果我们要定时50 ms,即0.05 s,所以需要921600 * 0.05 = 46080个机器周期。而如果我们的定时器工作
在16位定时器/计数器模式,那么最大值为 2^16=65536,所以初值设置为 65536-46080 = 19456。
十六进制写法为:
TH0 = 0X4c;
TL0 = 0x00;
十进制写法为:
TH0 = (65536-46080)/256;
TL0 = (65536-46080)%256;
(16位二进制数对256求模得到的是高八位,同理求余得到的是低八位)网页计算器
 | TH0 和 TL0 计算器 |
|---|
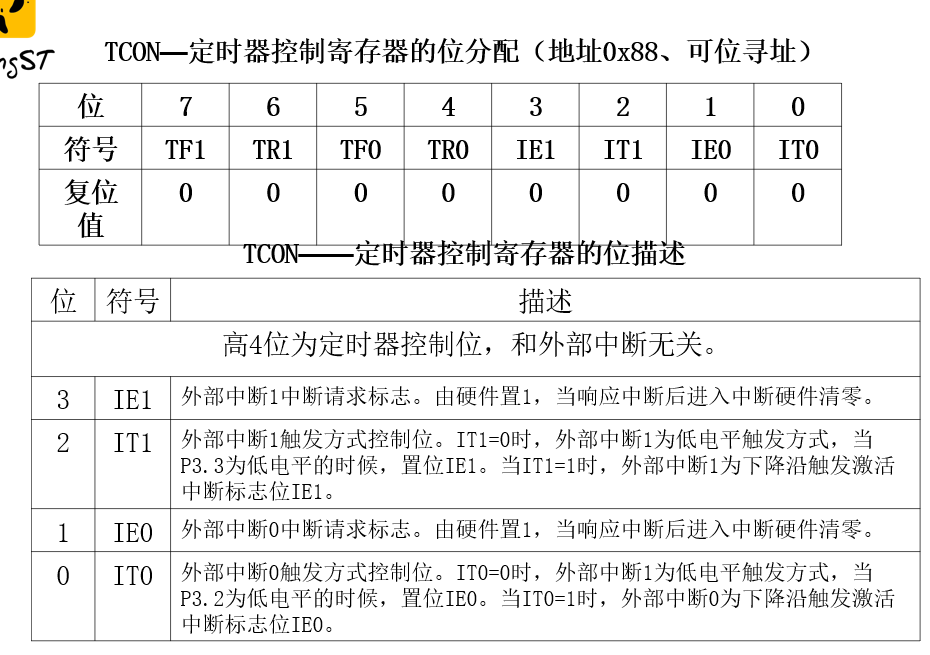
TCON——定时器控制寄存器
TF0
定时器0溢出标记 ,记录溢出次数
比如,一天24小时,通过溢出记录是第几天
清零
- 软件清零
- 硬件清零(进入定时器中断时)
TR0
定时器0运行控制位,TR0 = 0停止,TR0 = 1 开始
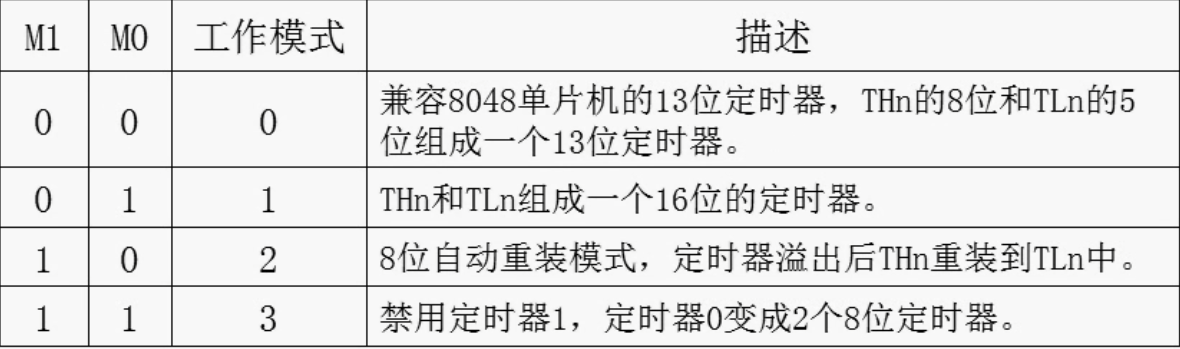
TMOD——定时器模式寄存器


M1/M0工作模式
示例(自动重装)

溢出后,自动重装,TL0初始值变为0x55
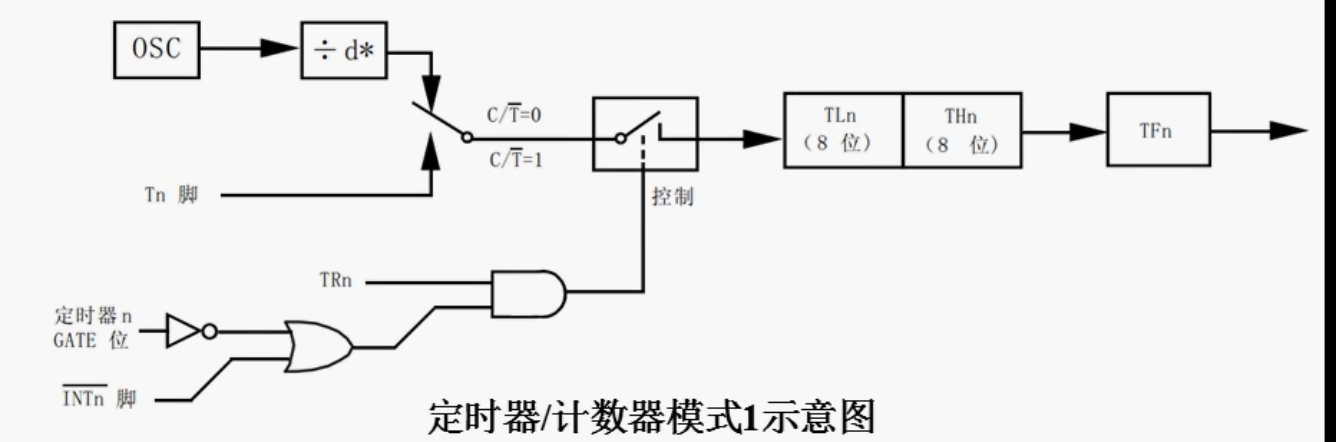
定时器/计数器模式1示意图
使用定时器的方法
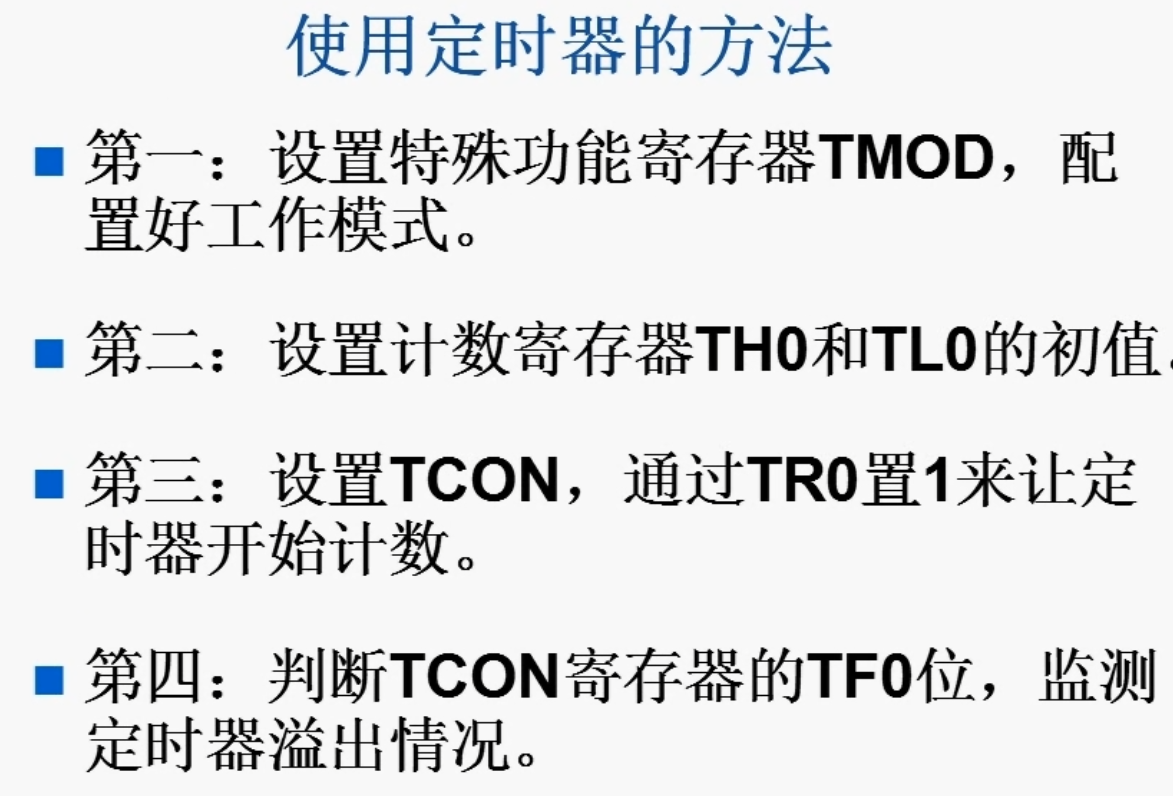
TMOD
| 位 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
|---|---|---|---|---|---|---|---|---|
| 符号 | GATE(T1) | C/T(T1) | M1(T1) | M0(T1) | GATE(T0) | C/T(T0) | M1(T0) | M0(T0) |
| 复位值 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
示例代码(LED闪烁)
#include<reg52.h>
sbit LED = P0^0;
sbit ADDR0 = P1^0;
sbit ADDR1 = P1^1;
sbit ADDR2 = P1^2;
sbit ADDR3 = P1^3;
sbit ENLED = P1^4;
void main()
{
unsigned char cnt = 0;
unsigned char flag = 0;
//unsigned int i=0;
ENLED = 0;
ADDR3 = 1;
ADDR2 = 1;
ADDR1 = 1;
ADDR0 = 0;
TMOD = 0x01;
TH0 = 0xB8; // x * 12 /11059200 = 0.2 x = 18432 TH0 = 65535 + 1 - x
TL0 = 0x00;
TR0 = 1;
while(1)
{
if(TF0 == 1)
{
TF0 = 0;
TH0 = 0xB8;
TL0 = 0x00;
cnt++;
if(cnt>=50)
{
cnt = 0;
P0 = ~(0x01<<flag);
flag++;
if(flag>=8){
flag = 0;
}
}
}
}
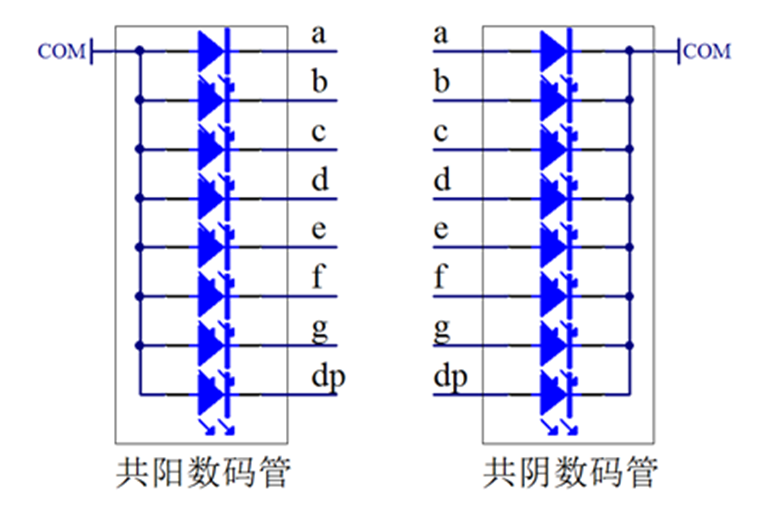
}静态数码管
数码管原理图
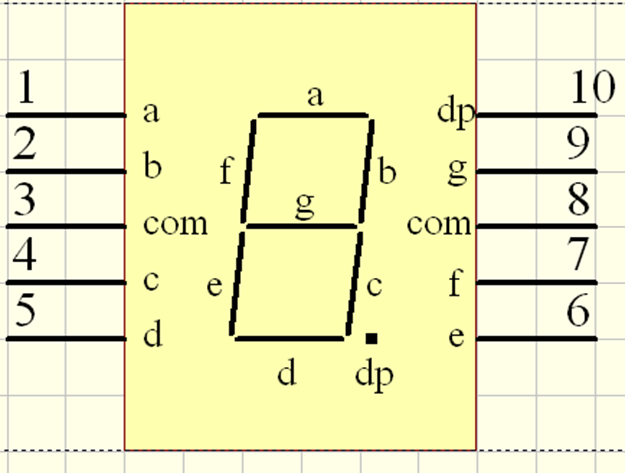
本单片机为共阳极数码管
给与低电平亮
数码管真值表
| 字符 | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 |
|---|---|---|---|---|---|---|---|---|
| 数值 | 0xC0 | 0xF9 | 0xA4 | 0xB0 | 0x99 | 0x92 | 0x82 | 0xF8 |
| 字符 | 8 | 9 | A | B | C | D | E | F |
| 数值 | 0x80 | 0x90 | 0x88 | 0x83 | 0xC6 | 0xA1 | 0x86 | 0x8E |
数码管显示0 -F(静态)
#include<reg52.h>
sbit ADDR0 = P1^0;
sbit ADDR1 = P1^1;
sbit ADDR2 = P1^2;
sbit ADDR3 = P1^3;
sbit ENLED = P1^4;
unsigned char code LedChar[]={
0xC0, 0xF9, 0xA4, 0xB0, 0x99, 0x92, 0x82, 0xF8,
0x80, 0x90, 0x88, 0x83, 0xC6, 0xA1, 0x86, 0x8E
};
void main()
{
unsigned char cnt = 0;
unsigned char sec = 0;
ENLED = 0;
ADDR3 = 1;
ADDR2 = 0;
ADDR1 = 0;
ADDR0 = 0;
TMOD = 0x01;
TH0 = 0xB8;
TL0 = 0x00;
TR0 = 1;
while(1)
{
if(TF0 == 1)
{
TF0 = 0;
TH0 = 0xB8;
TL0 = 0x00;
cnt++;
if(cnt >= 50)
{
cnt = 0;
P0 = LedChar[sec];
if(sec >= 15)
{
sec = 0;
}
else
{
sec++;
}
}
}
}
}动态数码管
原理
- 多个数码管显示数字的时候,我们实际上是轮流点亮数码管(一个时刻只有一个数码管是亮的),利用人眼的视觉暂留现象(也叫**余晖效应 **)
- 刷新周期<10ms(100Hz无闪烁)
- 刷新速度没必要过快
代码
#include<reg52.h>
sbit ADDR0 = P1^0;
sbit ADDR1 = P1^1;
sbit ADDR2 = P1^2;
sbit ADDR3 = P1^3;
sbit ENLED = P1^4;
unsigned char code LedChar[]={
0xC0, 0xF9, 0xA4, 0xB0, 0x99, 0x92, 0x82, 0xF8,
0x80, 0x90, 0x88, 0x83, 0xC6, 0xA1, 0x86, 0x8E
};
unsigned char LedBuff[6]={
0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF
};
void main()
{
unsigned int cnt = 0;
unsigned long sec = 0;
unsigned char i = 0;
ENLED = 0;
ADDR3 = 1;
TMOD = 0x01;
TH0 = 0xFC;
TL0 = 0x67;
TR0 = 1;
while(1)
{
if(TF0 ==1)
{
TF0 = 0;
TH0 = 0xFC;
TL0 = 0x67;
cnt++;
if(cnt >= 1000)
{
cnt = 0;
sec++;
LedBuff[0] = LedChar[sec%10];
LedBuff[1] = LedChar[sec/10%10];
LedBuff[2] = LedChar[sec/100%10];
LedBuff[3] = LedChar[sec/1000%10];
LedBuff[4] = LedChar[sec/10000%10];
LedBuff[5] = LedChar[sec/100000%10];
}
if(i == 0)
{ADDR2=0; ADDR1=0; ADDR0=0; i++; P0=LedBuff[0];}
else if(i == 1)
{ADDR2=0; ADDR1=0; ADDR0=1; i++; P0=LedBuff[1];}
else if(i == 2)
{ADDR2=0; ADDR1=1; ADDR0=0; i++; P0=LedBuff[2];}
else if(i == 3)
{ADDR2=0; ADDR1=1; ADDR0=1; i++; P0=LedBuff[3];}
else if(i == 4)
{ADDR2=1; ADDR1=0; ADDR0=0; i++; P0=LedBuff[4];}
else if(i == 5)
{ADDR2=1; ADDR1=0; ADDR0=1; i=0; P0=LedBuff[5];}
}
}
}中断
中断使能寄存器
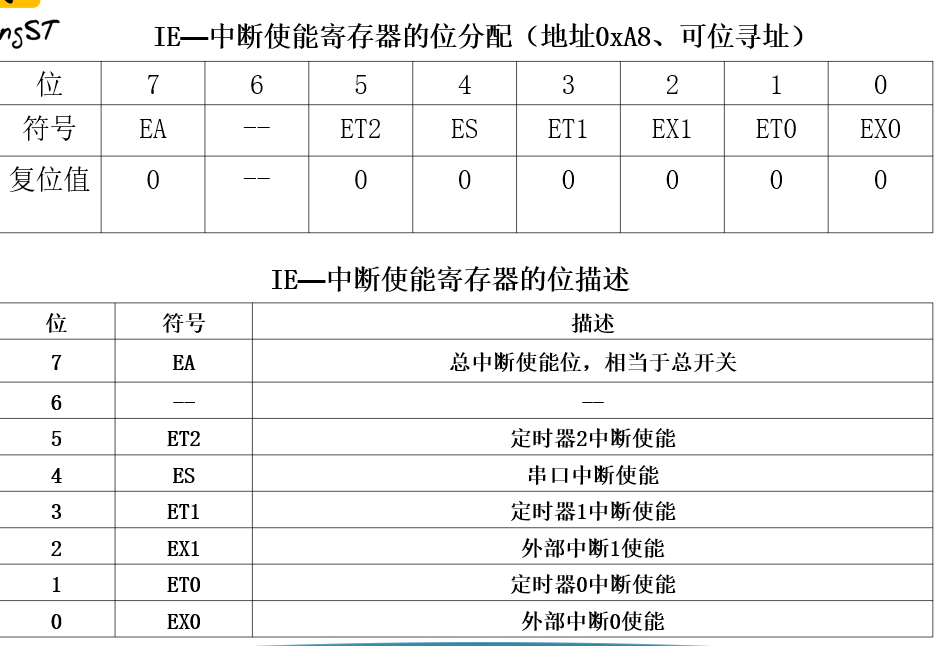
中断查询序列

进入中断的条件
打开中断(EA,ET0)
符合中断条件
中断入口正确 interrupt x
计算方法:
x * 8 + 3 = 中断向量地址
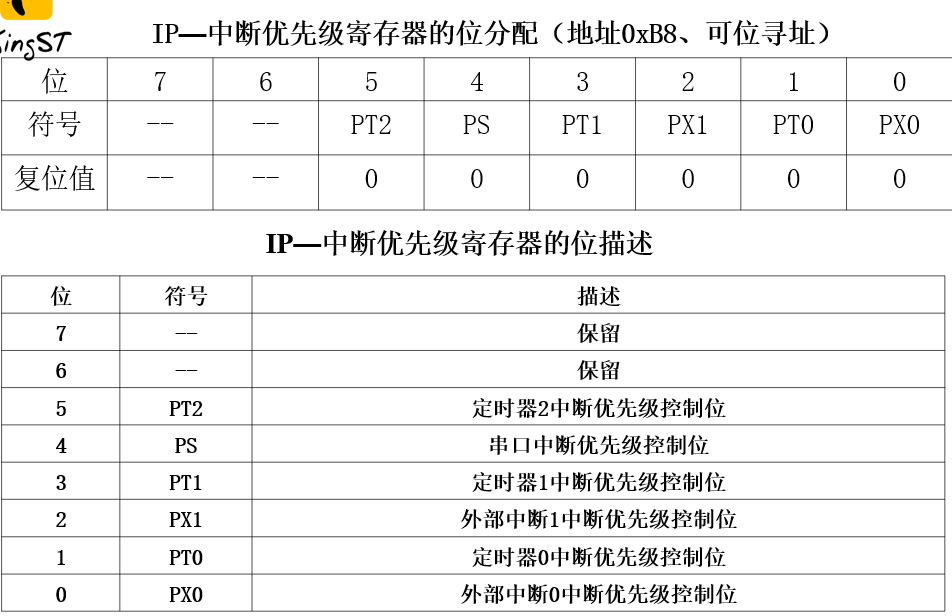
中断优先级
当设置为默认中断固有优先级时:
当几个中断同时发生时,则先处理中断优先级高的中断程序,在处理任意中断期间发生中断,都不会响应。
当配置了中断优先级,即抢占优先级
同时发生中断,优先级高的先响应,在处理任意中断时,发生同级别或低级的中断,则不响应,发生优先级更高的中断时,则先处理高优先级中断,处理完毕,再回来处理当前中断。
应用
#include<reg52.h>
sbit ADDR0 = P1^0;
sbit ADDR1 = P1^1;
sbit ADDR2 = P1^2;
sbit ADDR3 = P1^3;
sbit ENLED = P1^4;
unsigned char code LedChar[]={
0xC0, 0xF9, 0xA4, 0xB0, 0x99, 0x92, 0x82, 0xF8,
0x80, 0x90, 0x88, 0x83, 0xC6, 0xA1, 0x86, 0x8E
};
unsigned char LedBuff[6]={
0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF
};
unsigned int cnt = 0;
void main()
{
unsigned long sec = 0;
ENLED = 0;
ADDR3 = 1;
TMOD = 0x01;
TH0 = 0xFC;
TL0 = 0x67;
TR0 = 1;
EA = 1;
ET0 = 1;
while(1)
{
if(cnt >= 1000)
{
cnt = 0;
sec++;
LedBuff[0] = LedChar[sec%10];
LedBuff[1] = LedChar[sec/10%10];
LedBuff[2] = LedChar[sec/100%10];
LedBuff[3] = LedChar[sec/1000%10];
LedBuff[4] = LedChar[sec/10000%10];
LedBuff[5] = LedChar[sec/100000%10];
}
}
}
unsigned char i = 0;
void InterruptTimer0() interrupt 1
{
TH0 = 0xFC;
TL0 = 0x67;
cnt++;
P0 = 0xFF;
switch(i)
{
case 0: ADDR2=0; ADDR1=0; ADDR0=0; i++; P0=LedBuff[0];break;
case 1: ADDR2=0; ADDR1=0; ADDR0=1; i++; P0=LedBuff[1];break;
case 2: ADDR2=0; ADDR1=1; ADDR0=0; i++; P0=LedBuff[2];break;
case 3: ADDR2=0; ADDR1=1; ADDR0=1; i++; P0=LedBuff[3];break;
case 4: ADDR2=1; ADDR1=0; ADDR0=0; i++; P0=LedBuff[4];break;
case 5: ADDR2=1; ADDR1=0; ADDR0=1; i=0; P0=LedBuff[5];break;
default:break;
}
}点阵
点阵LED原理
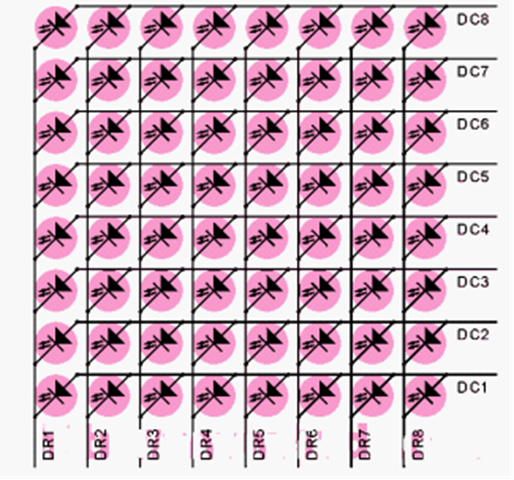
8 * 8 = 64 个小灯
学习步骤
- 取模软件的应用
- 点阵流动字母的显示
- 实际上是多个图片的切换
- 利用二维数组达到横向图片切换
代码
#include<reg52.h>
sbit ADDR0 = P1^0;
sbit ADDR1 = P1^1;
sbit ADDR2 = P1^2;
sbit ADDR3 = P1^3;
sbit ENLED = P1^4;
unsigned char code image[30][8] = {
{0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF,0xFF}, //动画帧1
{0xFF,0x7F,0xFF,0xFF,0xFF,0xFF,0xFF,0x7F},
{0xFF,0x3F,0x7F,0x7F,0x7F,0x7F,0x7F,0x3F},
{0xFF,0x1F,0x3F,0x3F,0x3F,0x3F,0x3F,0x1F},
{0xFF,0x0F,0x9F,0x9F,0x9F,0x9F,0x9F,0x0F},
{0xFF,0x87,0xCF,0xCF,0xCF,0xCF,0xCF,0x87},
{0xFF,0xC3,0xE7,0xE7,0xE7,0xE7,0xE7,0xC3},
{0xFF,0xE1,0x73,0x73,0x73,0xF3,0xF3,0xE1},
{0xFF,0x70,0x39,0x39,0x39,0x79,0xF9,0xF0},
{0xFF,0x38,0x1C,0x1C,0x1C,0x3C,0x7C,0xF8},
{0xFF,0x9C,0x0E,0x0E,0x0E,0x1E,0x3E,0x7C},
{0xFF,0xCE,0x07,0x07,0x07,0x0F,0x1F,0x3E},
{0xFF,0x67,0x03,0x03,0x03,0x07,0x0F,0x9F},
{0xFF,0x33,0x01,0x01,0x01,0x03,0x87,0xCF},
{0xFF,0x99,0x00,0x00,0x00,0x81,0xC3,0xE7},
{0xFF,0xCC,0x80,0x80,0x80,0xC0,0xE1,0xF3},
{0xFF,0xE6,0xC0,0xC0,0xC0,0xE0,0xF0,0xF9},
{0xFF,0x73,0x60,0x60,0x60,0x70,0x78,0xFC},
{0xFF,0x39,0x30,0x30,0x30,0x38,0x3C,0x7E},
{0xFF,0x9C,0x98,0x98,0x98,0x9C,0x1E,0x3F},
{0xFF,0xCE,0xCC,0xCC,0xCC,0xCE,0x0F,0x1F},
{0xFF,0x67,0x66,0x66,0x66,0x67,0x07,0x0F},
{0xFF,0x33,0x33,0x33,0x33,0x33,0x03,0x87},
{0xFF,0x99,0x99,0x99,0x99,0x99,0x81,0xC3},
{0xFF,0xCC,0xCC,0xCC,0xCC,0xCC,0xC0,0xE1},
{0xFF,0xE6,0xE6,0xE6,0xE6,0xE6,0xE0,0xF0},
{0xFF,0xF3,0xF3,0xF3,0xF3,0xF3,0xF0,0xF8},
{0xFF,0xF9,0xF9,0xF9,0xF9,0xF9,0xF8,0xFC},
{0xFF,0xFC,0xFC,0xFC,0xFC,0xFC,0xFC,0xFE},
{0xFF,0xFE,0xFE,0xFE,0xFE,0xFE,0xFE,0xFF} //动画帧30
};
void main()
{
EA = 1;
ENLED = 0;
ADDR3 = 0;
TMOD =0x01;
TH0 = 0xFC;
TL0 = 0x67;
ET0 = 1;
TR0 = 1;
while(1);
}
void InterruptTimer0() interrupt 1
{
static unsigned char i = 0;
static unsigned char tmr = 0;
static unsigned char index = 0;
TH0 = 0xfc;
TL0 = 0x67;
P0 = 0xFF;
switch(i)
{
case 0: ADDR2=0; ADDR1=0; ADDR0=0; i++; P0=image[index][0]; break;
case 1: ADDR2=0; ADDR1=0; ADDR0=1; i++; P0=image[index][1]; break;
case 2: ADDR2=0; ADDR1=1; ADDR0=0; i++; P0=image[index][2]; break;
case 3: ADDR2=0; ADDR1=1; ADDR0=1; i++; P0=image[index][3]; break;
case 4: ADDR2=1; ADDR1=0; ADDR0=0; i++; P0=image[index][4]; break;
case 5: ADDR2=1; ADDR1=0; ADDR0=1; i++; P0=image[index][5]; break;
case 6: ADDR2=1; ADDR1=1; ADDR0=0; i++; P0=image[index][6]; break;
case 7: ADDR2=1; ADDR1=1; ADDR0=1; i=0; P0=image[index][7]; break;
default: break;
}
tmr++;
if(tmr >= 250)
{
tmr = 0;
index++;
if(index>= 30)
{
index = 0;
}
}
}单片机最小系统解析
电源
常用单片机的电源系统有5V系统和3.3V系统这两种。 常用的数字电路系统的电源类别有24V、12V、5V、3.3V、2.5V、1.8V。
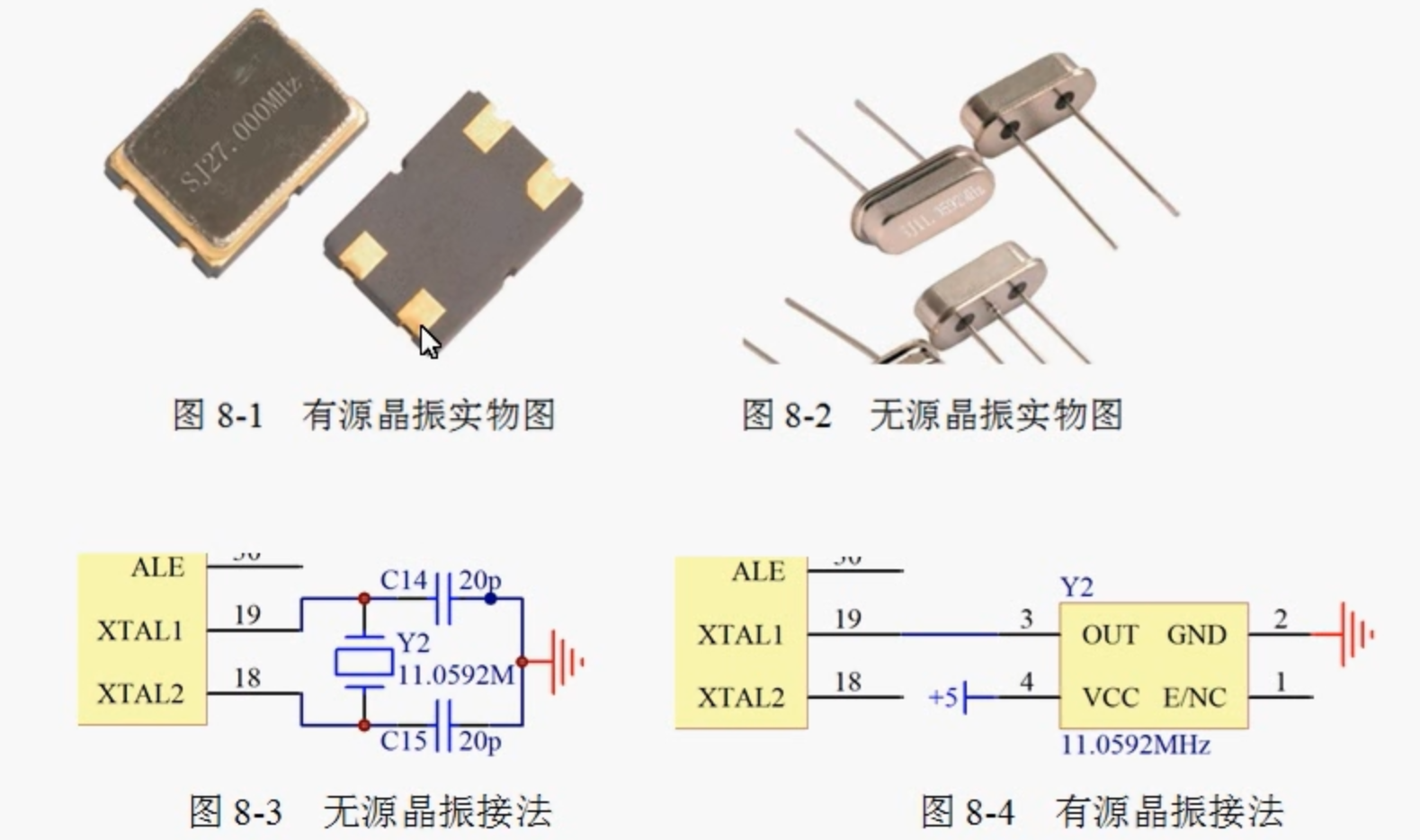
晶振
复位
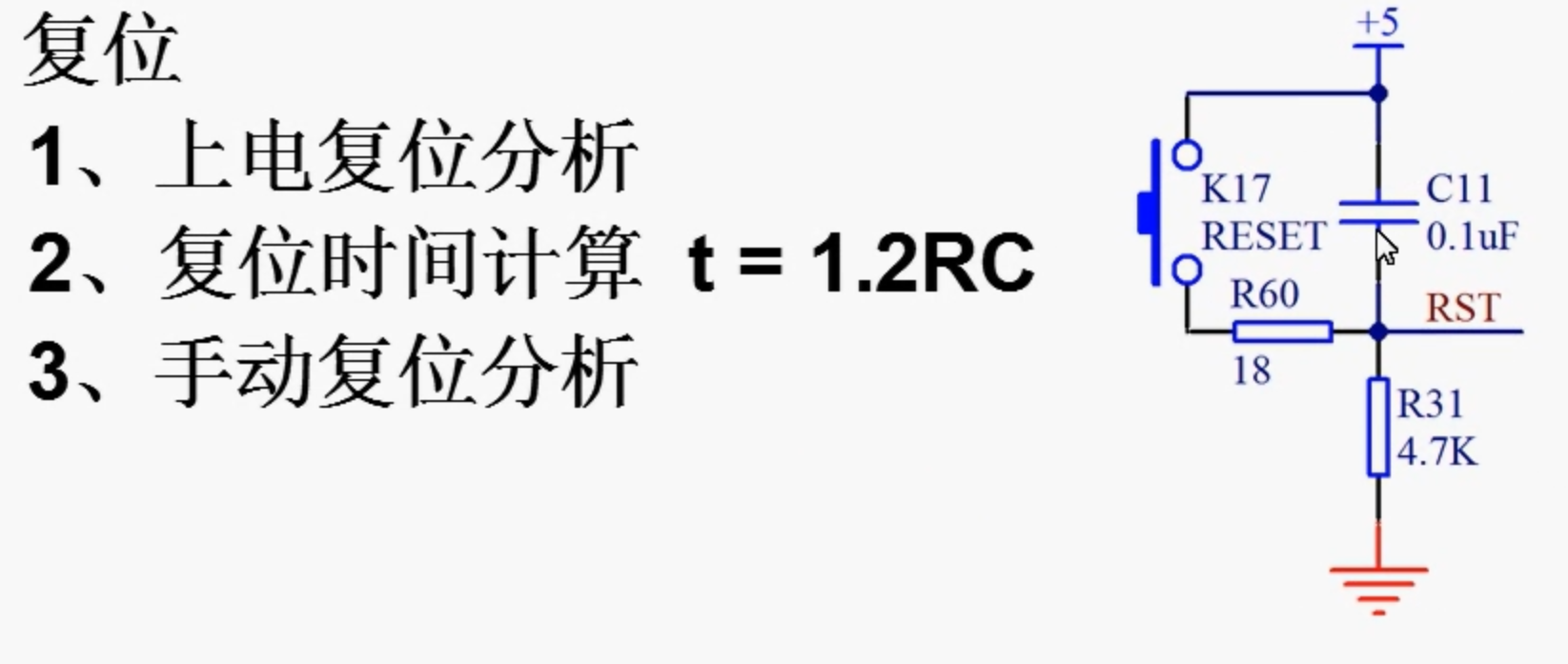
上电复位:
复位时间t = 1.2RC 故:t = 1.2 * 4.7K *0.1uF = 564us, 大于两个机器周期约2us,故能起到复位作用。
手动复位:人手按下按键的时间一般100ms以上,快的也有几十ms,故满足复位条件。18欧的电阻作用是放电时,K、R、C形成闭合回路,**消除干扰 **。
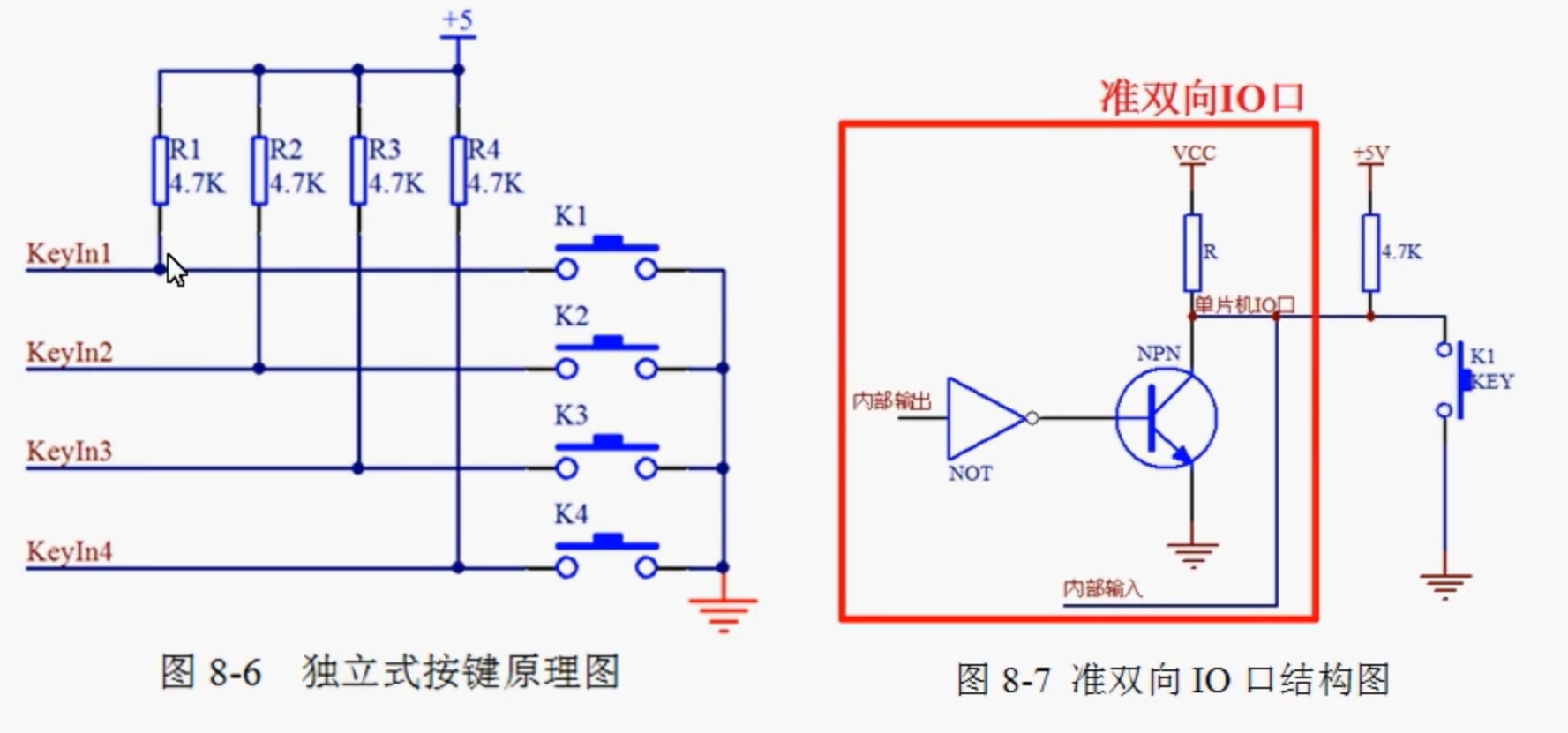
独立按键
独立按键原理
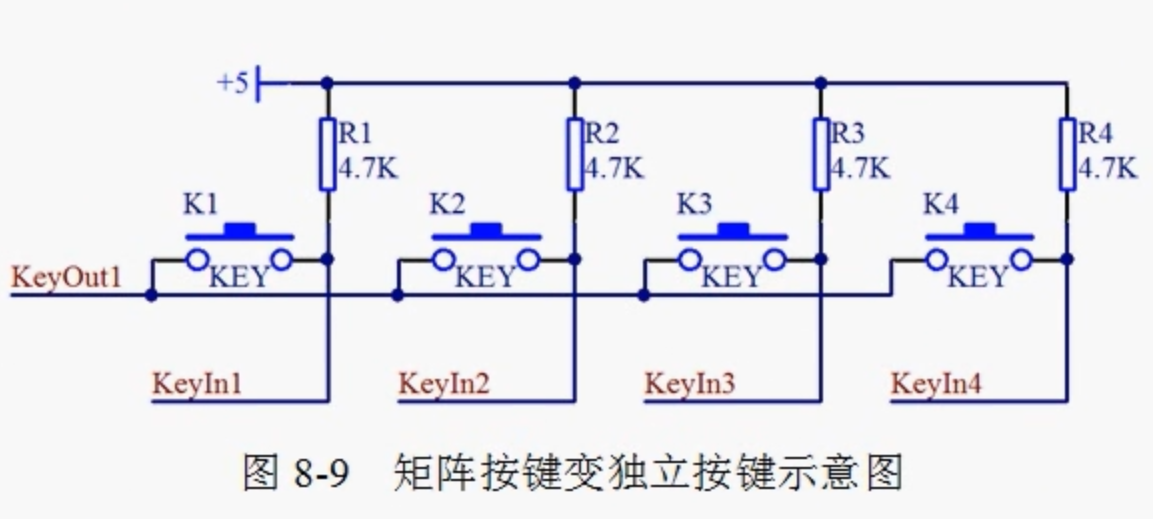
矩阵按键变独立按键
按键消抖
按下按键数码管+1出现跳动问题
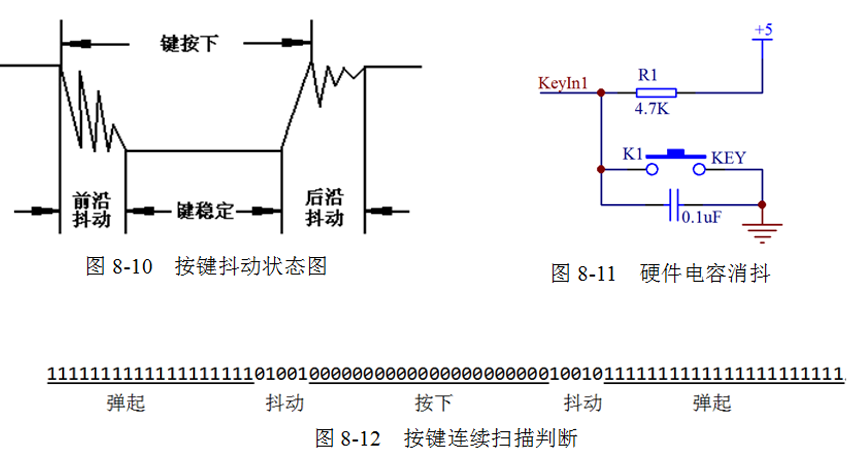
通过代码的延时来解决抖动问题
#include <reg52.h>
sbit ADDR0 = P1^0;
sbit ADDR1 = P1^1;
sbit ADDR2 = P1^2;
sbit ADDR3 = P1^3;
sbit ENLED = P1^4;
sbit KEY4 = P2^7;
// 数码管显示的字符编码
unsigned char code LedChar[] = {
0xC0, 0xF9, 0xA4, 0xB0, 0x99, 0x92, 0x82, 0xF8,
0x80, 0x90, 0x88, 0x83, 0xC6, 0xA1, 0x86, 0x8E
};
// 延时函数
void delay() {
unsigned int i = 1000;
while (i--);
}
void main() {
bit backup = 1; // 用于记录按钮按下状态的备份
bit keybuf = 1; // 用于记录按钮当前状态
unsigned char cnt = 0; // 计数器
ENLED = 0;
ADDR3 = 1;
ADDR2 = 0;
ADDR1 = 0;
ADDR0 = 0;
P2 = 0xF7;
P0 = LedChar[cnt]; // 初始化数码管显示
while (1) {
keybuf = KEY4; // 读取按钮当前状态
if (keybuf != backup) { // 如果按钮状态发生变化
delay(); // 延时防抖
if (keybuf == KEY4) { // 如果按钮仍然处于按下状态
if (backup == 0) { // 如果之前是按下的状态
cnt++; // 计数器递增
if (cnt >= 10) {
cnt = 0;
}
P0 = LedChar[cnt]; // 更新数码管显示
}
backup = KEY4; // 更新按钮状态备份
}
}
}
}连续读取判断是否抖动
void InterruptTimer0() interrupt 1
{
static unsigned char keybuf = 0xFF;
TH0 = 0xF8;
TL0 = 0xCD;
keybuf = (keybuf <<1) |KEY4;
if(keybuf == 0x00)
{
KeySta = 0;
}
else if(keybuf == 0xFF)
{
KeySta = 1;
}
else
{
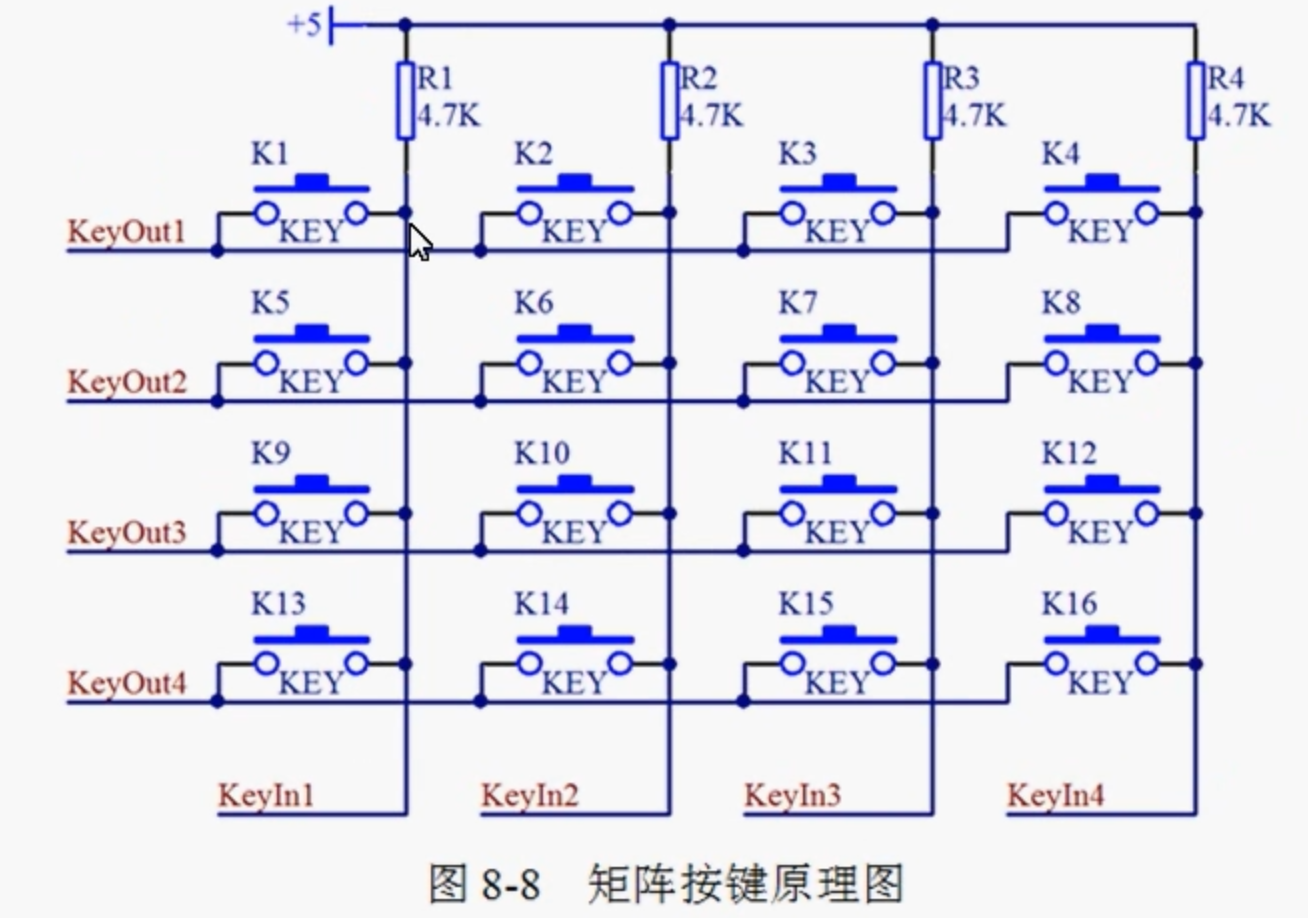
}矩阵按键
代码(去抖动)
#include<reg52.h>
sbit ADDR0 = P1^0;
sbit ADDR1 = P1^1;
sbit ADDR2 = P1^2;
sbit ADDR3 = P1^3;
sbit ENLED = P1^4;
sbit KEY_IN_1 = P2^4;
sbit KEY_IN_2 = P2^5;
sbit KEY_IN_3 = P2^6;
sbit KEY_IN_4 = P2^7;
sbit KEY_OUT_1 = P2^3;
sbit KEY_OUT_2 = P2^2;
sbit KEY_OUT_3 = P2^1;
sbit KEY_OUT_4 = P2^0;
unsigned char code LedChar[]={
0xC0, 0xF9, 0xA4, 0xB0, 0x99, 0x92, 0x82, 0xF8,
0x80, 0x90, 0x88, 0x83, 0xC6, 0xA1, 0x86, 0x8E
};
unsigned char KeySta[4][4] = {
{1,1,1,1},{1,1,1,1},{1,1,1,1},{1,1,1,1}
};
void main()
{
unsigned char i, j;
// 初始值全为1(未按下)
unsigned char backup[4][4] = {
{1,1,1,1},{1,1,1,1},{1,1,1,1},{1,1,1,1}
};
// 允许全局中断
EA = 1;
ENLED = 0;
ADDR3 = 1;
ADDR2 = 0;
ADDR1 = 0;
ADDR0 = 0;
// 设置定时器0工作在方式1
TMOD = 0x01;
// 设置定时器0的初始值
TH0 = 0xFC;
TL0 = 0x67;
// 允许定时器0中断
ET0 = 1;
// 启动定时器0
TR0 = 1;
// 初始化LED显示为LedChar数组中的第一个字符
P0 = LedChar[0];
// 主循环
while(1)
{
for(i=0; i<4; i++)
{
for(j=0; j<4; j++)
{
// 检测状态是否发生变化
if(backup[i][j] != KeySta[i][j])
{
// 如果按键按下
if(backup[i][j] == 0)
{
// 在LED数码管上显示相应字符
P0 = LedChar[i*4+j];
}
// 更新备份数组
backup[i][j] = KeySta[i][j];
}
}
}
}
}
// 定时器0中断服务程序
void InterruptTimer0() interrupt 1
{
// 静态变量,记录当前扫描的行号
static unsigned char keyout = 0;
unsigned char i = 0;
// 静态二维数组,保存按键缓冲区,初始值为0xFF
static unsigned char keybuf[4][4] = {
{0xFF, 0xFF, 0xFF, 0xFF},
{0xFF, 0xFF, 0xFF, 0xFF},
{0xFF, 0xFF, 0xFF, 0xFF},
{0xFF, 0xFF, 0xFF, 0xFF}
};
// 重置定时器0的初始值
TH0 = 0xFC;
TL0 = 0x67;
// 将键盘输入值放入按键缓冲区
keybuf[keyout][0] = (keybuf[keyout][0] <<1) | KEY_IN_1;
keybuf[keyout][1] = (keybuf[keyout][1] <<1) | KEY_IN_2;
keybuf[keyout][2] = (keybuf[keyout][2] <<1) | KEY_IN_3;
keybuf[keyout][3] = (keybuf[keyout][3] <<1) | KEY_IN_4;
// 检测按键状态
for(i=0; i<4; i++)
{
if((keybuf[keyout][i] & 0x0F) == 0x00)
{
// 按键按下
KeySta[keyout][i] = 0;
}
else if((keybuf[keyout][i] & 0x0F) == 0x0F)
{
// 按键释放
KeySta[keyout][i] = 1;
}
}
// 切换到下一行
keyout++;
keyout = keyout & 0x03;
switch(keyout)
{
case 0: KEY_OUT_4 = 1; KEY_OUT_1 = 0; break;
case 1: KEY_OUT_1 = 1; KEY_OUT_2 = 0; break;
case 2: KEY_OUT_2 = 1; KEY_OUT_3 = 0; break;
case 3: KEY_OUT_3 = 1; KEY_OUT_4 = 0; break;
default: break;
}
}代码
独立按键控制LED亮灭
#include<reg52.h>
sbit ADDR0 = P1^0;
sbit ADDR1 = P1^1;
sbit ADDR2 = P1^2;
sbit ADDR3 = P1^3;
sbit ENLED = P1^4;
sbit LED9 = P0^7;
sbit LED8 = P0^6;
sbit LED7 = P0^5;
sbit LED6 = P0^4;
sbit KEY1 = P2^4;
sbit KEY2 = P2^5;
sbit KEY3 = P2^6;
sbit KEY4 = P2^7;
void main(){
ENLED = 0;
ADDR3 = 1;
ADDR2 = 1;
ADDR1 = 1;
ADDR0 = 0;
P2 = 0xF7;
while(1){
LED9 = KEY1;
LED8 = KEY2;
LED7 = KEY3;
LED6 = KEY4;
}
}单片机IO口的结构
单片机IO口的结构
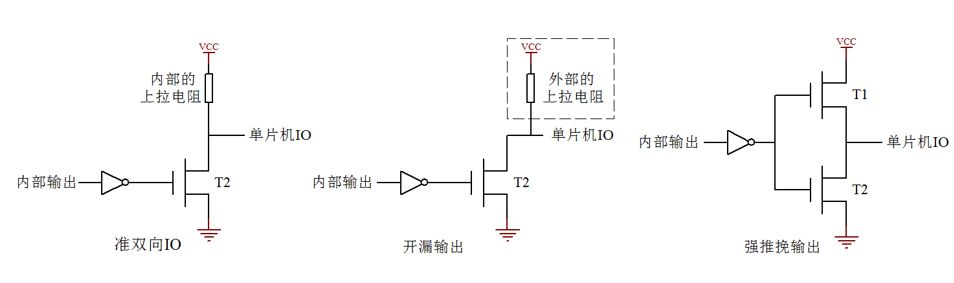
上下拉电阻
上拉电阻就是将不确定的信号通过一个电阻拉到高电平,同时此电阻起到一个限流的作用,下拉就是下拉到低电平。
1、OC门要输出高电平,外部必须加上拉电阻。
2、加大普通IO口的驱动能力。
3、起到限流的作用。
4、抵抗电磁干扰。
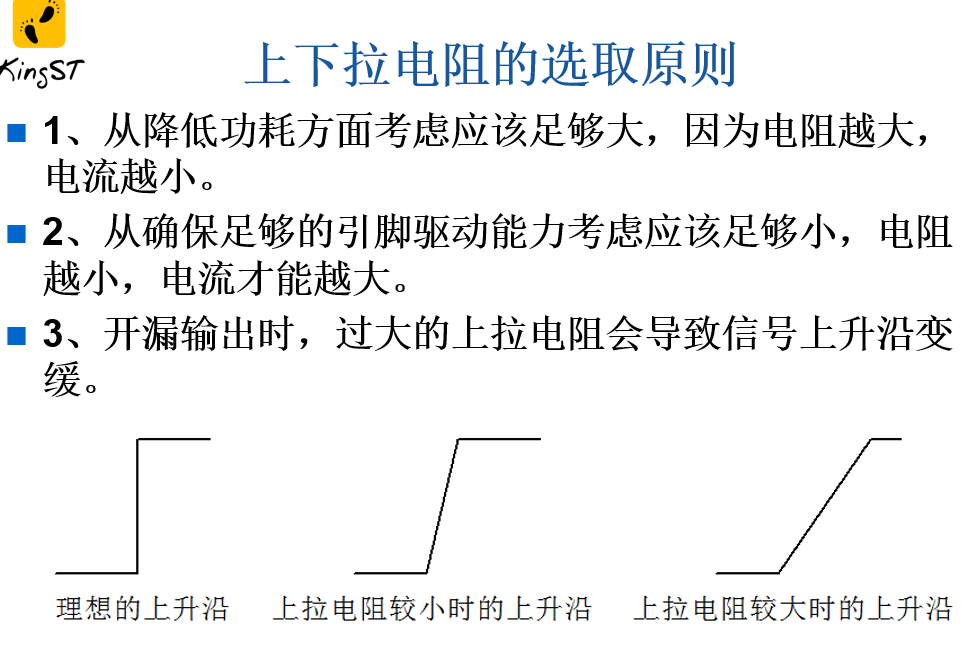
选取原则
步进电机
电机分类
- 驱动类电机
- 洗衣机、汽车
- 控制类电机
- 步进电机-----照相机、机器人—控制转动角度
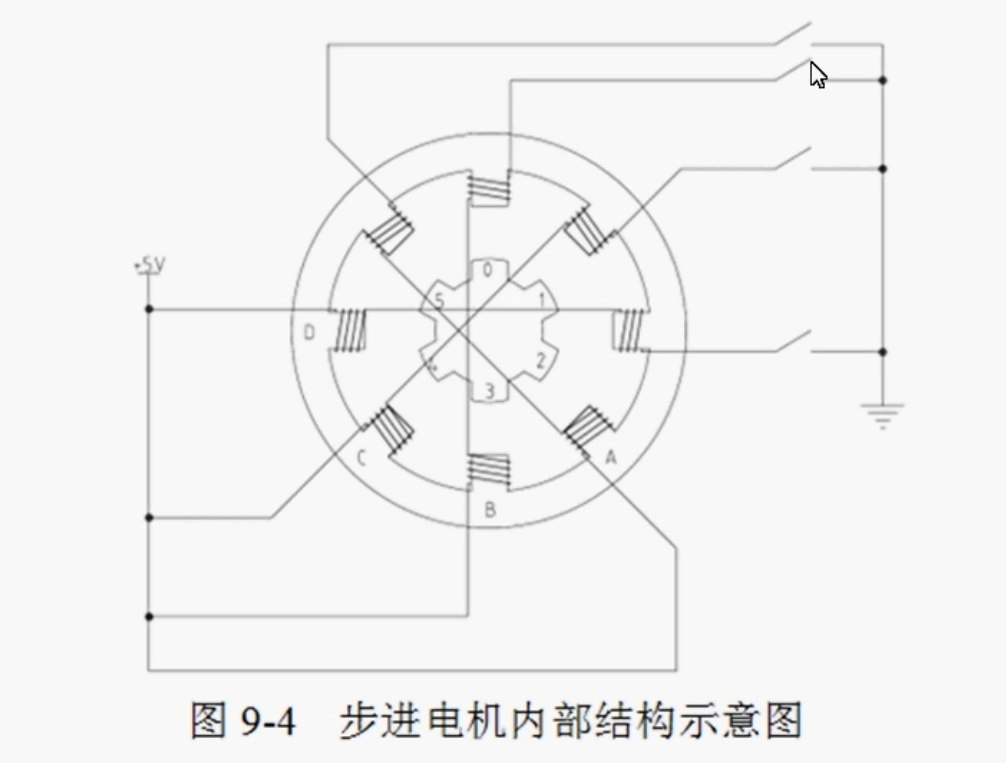
28BYJ-48步进电机
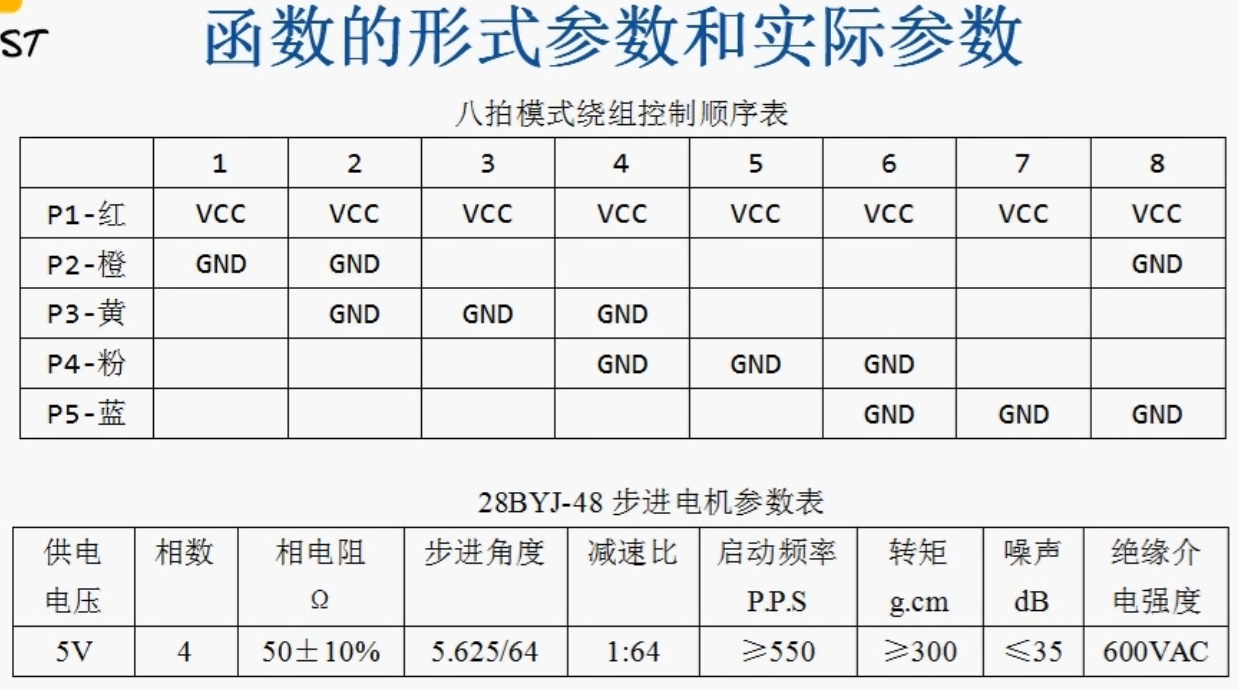
参数
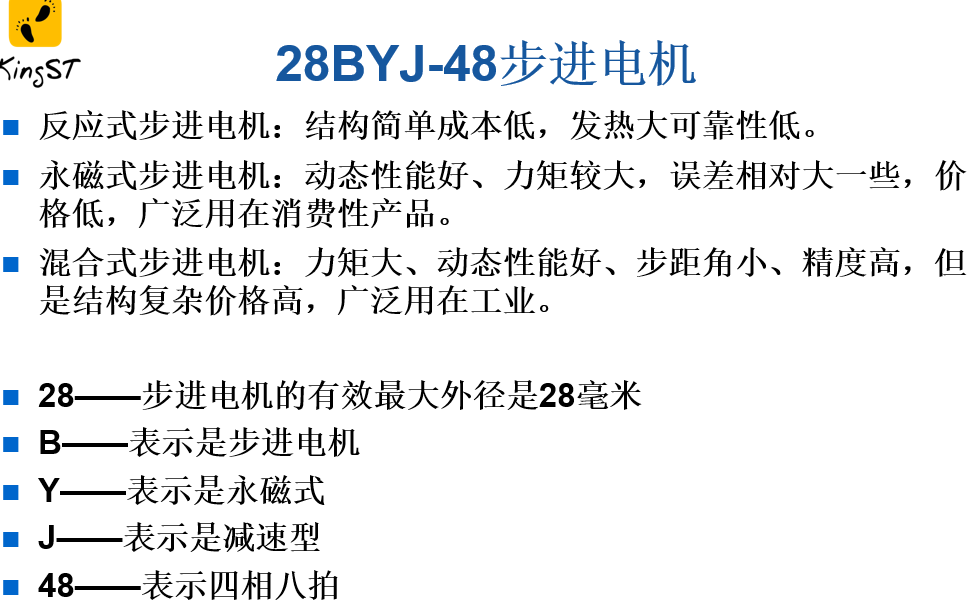
八拍工作模式
八拍工作方式的英文名是half-stepping,英文表达很形象,转子从A转到AB中间,再有AB中间转到B,好似每次只走了半步。因此线圈通电顺序是:A-AB-B-BA’-A’-A’B’-B’-B’A(我用A‘代替了图中的“A非”)。 八拍工作模式最大的好处就是扭矩大。
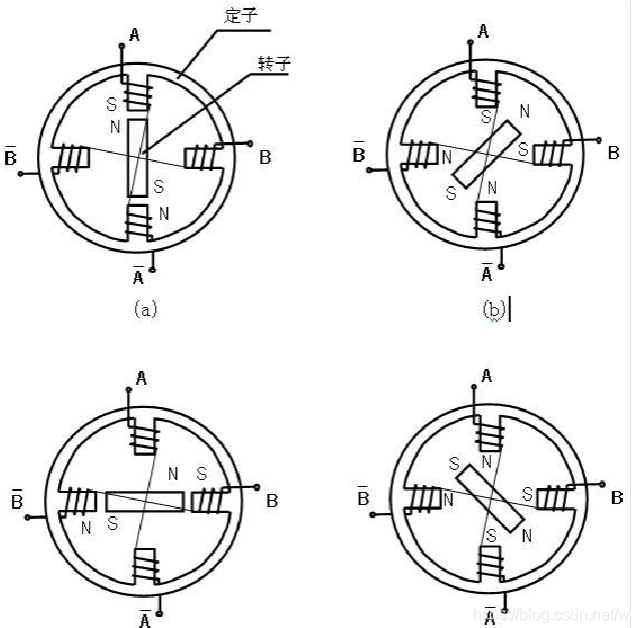
PS:四相电机的叫法可能存在一定问题(误导性),因为准确说它其实只有两组相位,四相=两组相位,图一中的定子也是成对命名的(A+/A-,B+/B-),所以图一中的步进电机更好的称呼是双相位五线式步进电机。当然主流叫法仍是五线四相,叫起来顺口,还是尽量使用“四相”称呼以方便交流。
内部结构
控制参数
蜂鸣器
分类
蜂鸣器
压电式蜂鸣器:电陶瓷片发音 电磁式蜂鸣器:线圈通电,电动发音,体积较小 有源蜂鸣器,指震荡源有源放鸣器内部带了震荡源 无源蜂鸣器,价格便宜,但是可以产生高低音D4:蓄流二极管,防止关断时,对三极管造成损伤
蜂鸣器是感性元器件
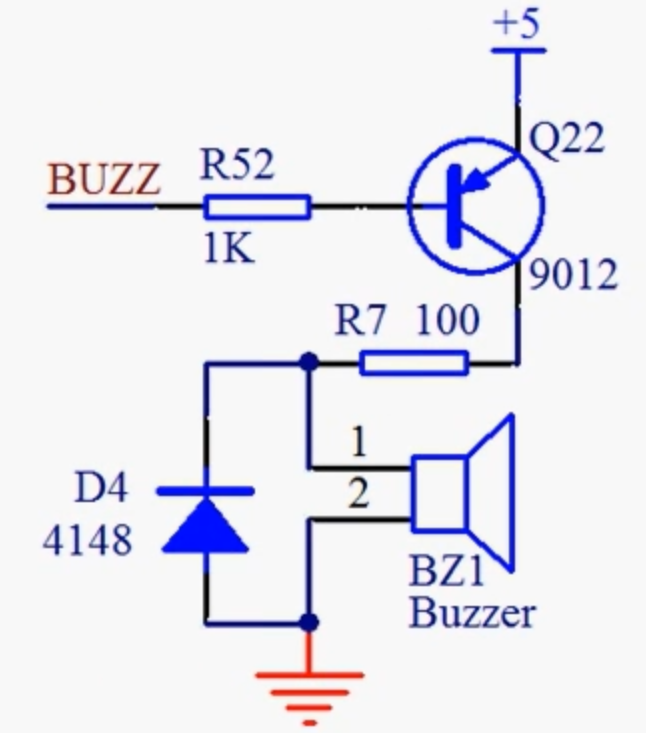
#include <reg52.h>
sbit BUZZ = P1^6; //蜂鸣器控制引脚
unsigned int code NoteFrequ[] = { //中音1-7和高音1-7对应频率列表
523, 587, 659, 698, 784, 880, 988, //中音1-7
1047, 1175, 1319, 1397, 1568, 1760, 1976 //高音1-7
};
unsigned int code NoteReload[] = { //中音1-7和高音1-7对应的定时器重载值
65536 - (11059200/12) / (523*2), //中音1
65536 - (11059200/12) / (587*2), //2
65536 - (11059200/12) / (659*2), //3
65536 - (11059200/12) / (698*2), //4
65536 - (11059200/12) / (784*2), //5
65536 - (11059200/12) / (880*2), //6
65536 - (11059200/12) / (988*2), //7
65536 - (11059200/12) / (1047*2), //高音1
65536 - (11059200/12) / (1175*2), //2
65536 - (11059200/12) / (1319*2), //3
65536 - (11059200/12) / (1397*2), //4
65536 - (11059200/12) / (1568*2), //5
65536 - (11059200/12) / (1760*2), //6
65536 - (11059200/12) / (1976*2), //7
};
bit enable = 1; //蜂鸣器发声使能标志
bit tmrflag = 0; //定时器中断完成标志
unsigned char T0RH = 0xFF; //T0重载值的高字节
unsigned char T0RL = 0x00; //T0重载值的低字节
void PlayTwoTiger();
void main()
{
unsigned int i;
EA = 1; //使能全局中断
TMOD = 0x01; //配置T0工作在模式1
TH0 = T0RH;
TL0 = T0RL;
ET0 = 1; //使能T0中断
TR0 = 1; //启动T0
while (1)
{
PlayTwoTiger(); //播放乐曲--两支老虎
for (i=0; i<40000; i++); //停止一段时间
}
}
/* 两只老虎乐曲播放函数 */
void PlayTwoTiger()
{
unsigned char beat; //当前节拍索引
unsigned char note; //当前节拍对应的音符
unsigned int time = 0; //当前节拍计时
unsigned int beatTime = 0; //当前节拍总时间
unsigned int soundTime = 0; //当前节拍需发声时间
//两只老虎音符表
unsigned char code TwoTigerNote[] = {
1, 2, 3, 1, 1, 2, 3, 1, 3, 4, 5, 3, 4, 5,
5,6, 5,4, 3, 1, 5,6, 5,4, 3, 1, 1, 5, 1, 1, 5, 1,
};
//两只老虎节拍表,4表示一拍,1就是1/4拍,8就是2拍
unsigned char code TwoTigerBeat[] = {
4, 4, 4, 4, 4, 4, 4, 4, 4, 4, 8, 4, 4, 8,
3,1, 3,1, 4, 4, 3,1, 3,1, 4, 4, 4, 4, 8, 4, 4, 8,
};
for (beat=0; beat<sizeof(TwoTigerNote); ) //用节拍索引作为循环变量
{
while (!tmrflag); //每次定时器中断完成后,检测并处理节拍
tmrflag = 0;
if (time == 0) //当前节拍播完则启动一个新节拍
{
note = TwoTigerNote[beat] - 1;
T0RH = NoteReload[note] >> 8;
T0RL = NoteReload[note];
//计算节拍总时间,右移2位相当于除4,移位代替除法可以加快执行速度
beatTime = (TwoTigerBeat[beat] * NoteFrequ[note]) >> 2;
//计算发声时间,为总时间的0.75,移位原理同上
soundTime = beatTime - (beatTime >> 2);
enable = 1; //指示蜂鸣器开始发声
time++;
}
else //当前节拍未播完则处理当前节拍
{
if (time >= beatTime) //当前持续时间到达节拍总时间时归零,
{ //并递增节拍索引,以准备启动新节拍
time = 0;
beat++;
}
else //当前持续时间未达到总时间时,
{
time++; //累加时间计数
if (time == soundTime) //到达发声时间后,指示关闭蜂鸣器,
{ //插入0.25*总时间的静音间隔,
enable = 0; //用以区分连续的两个节拍
}
}
}
}
}
/* T0中断服务函数,用于控制蜂鸣器发声 */
void InterruptTimer0() interrupt 1
{
TH0 = T0RH; //重新加载重载值
TL0 = T0RL;
tmrflag = 1;
if (enable) //使能时反转蜂鸣器控制电平
BUZZ = ~BUZZ;
else //未使能时关闭蜂鸣器
BUZZ = 1;
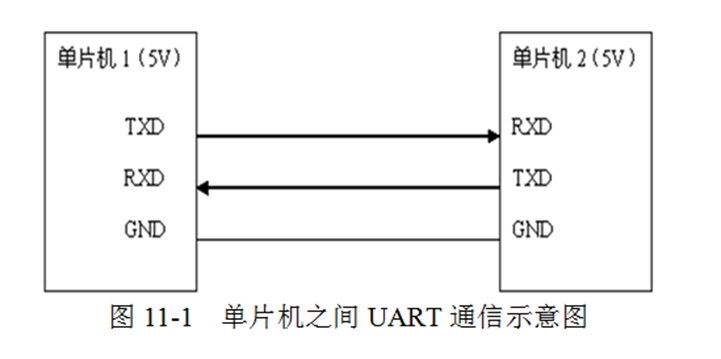
}UART串口通信
通信方式
通信方式
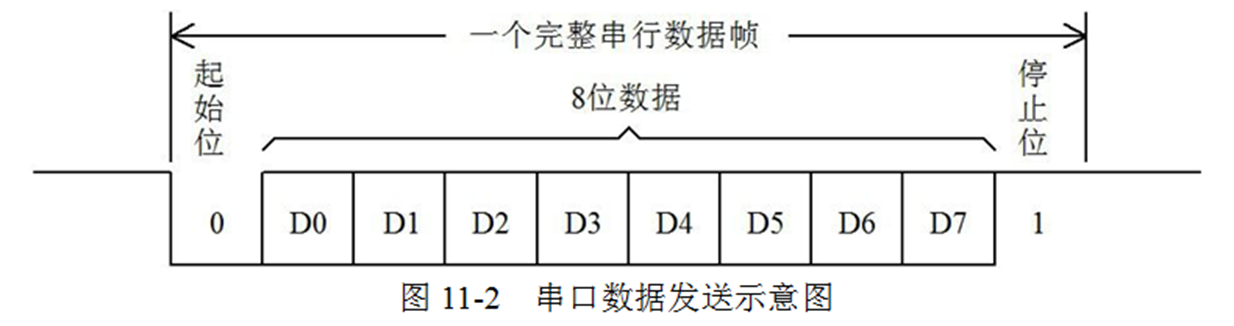
并行通信:通信时数据的各个位同时传送,可以实现字节为单位通信,但是通信线多占用资源多,成本高。串行通信,一次只能发送一位,(每一位的持续时间----波特率baud)要发送8次才能发送一个字节。
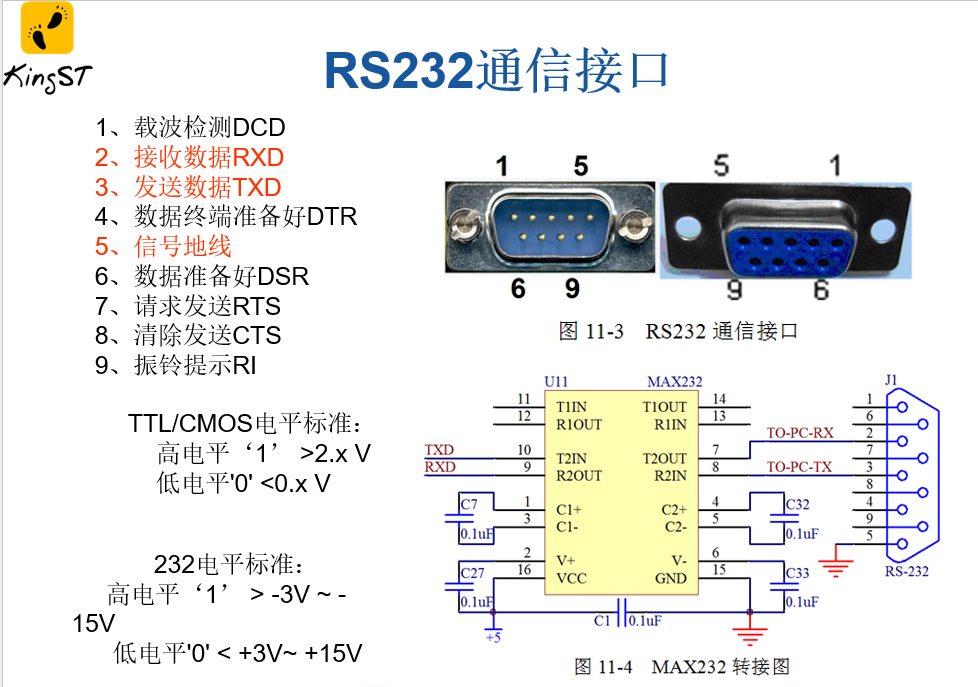
RS232通信接口
三种基本通信类型
三种基本通信类型
单工通信:只允许一方向另外一方传送信息,另一方不能回传信息,比如电视遥控器、收音机广播等。
半双工通信:数据可以在双方之间传播,同一时刻只能其中一方发给另外一方,比如对讲机就是典型半双工。
全双工通信:发送数据的同时也能够接收数据,两者同步进行,比如我们的电话通信。
串口通信程序的基本步骤
串口通信程序的基本步骤
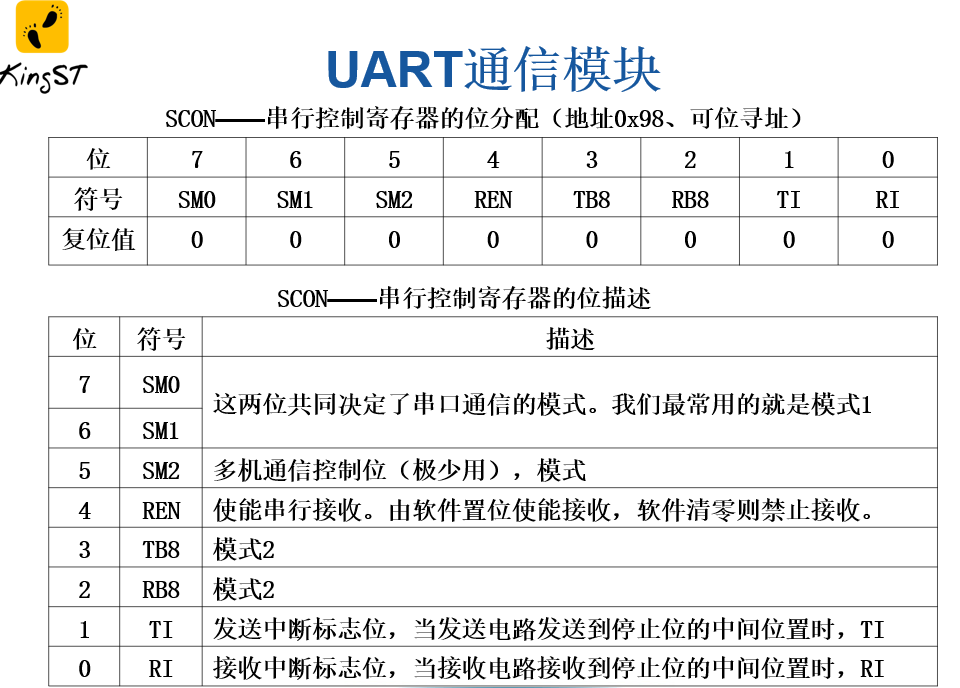
配置串口为模式1。
配置定时器T1为模式2,即自动重装模式。
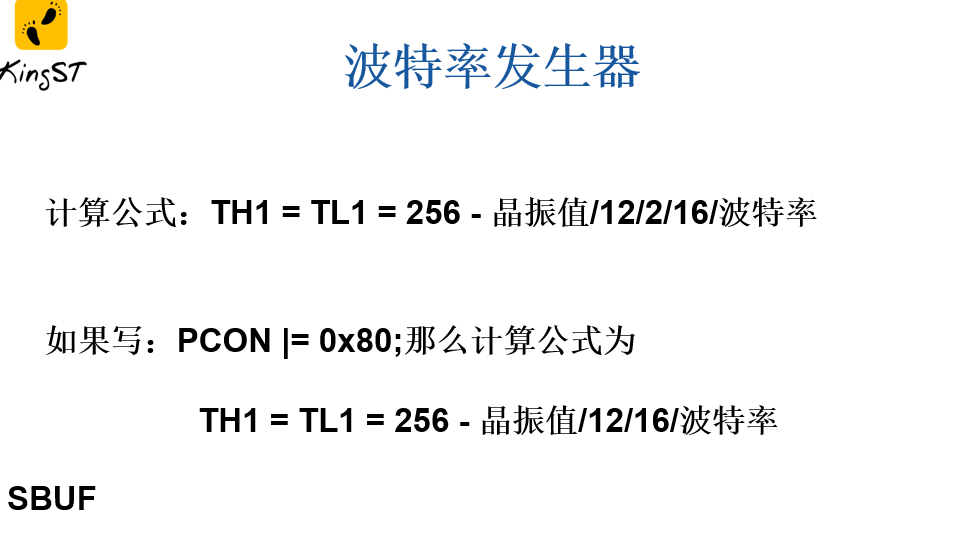
根据波特率计算TH1和TL1的初值,如果有需要可以使用PCON进行波特率加倍。
打开定时器控制寄存器TR1,让定时器跑起来。
#include<reg52.h>
void ConfigUART(unsigned int baud);
void main()
{
ConfigUART(9600);
while(1)
{
while(!RI);
RI = 0;
SBUF = SBUF + 1;//第一个是发送buffer,第二个是接收
while(!TI);
TI = 0;
}
}
void ConfigUART(unsigned int baud)//配置波特率
{
SCON = 0x50;
TMOD &= 0X0F;
TMOD |= 0x20;
TH1 = 256 - (11059200/12/32)/baud;
TL1 = TH1;
ET1 = 0;//T1用作波特率发生器的时候,就不能用T1产生中断
TR1 = 1;
}
//使用中断,不占用主循环
#include <reg52.h>
void ConfigUART(unsigned int baud);
void main()
{
EA = 1; //使能总中断
ConfigUART(9600); //配置波特率为9600
while(1);
}
void ConfigUART(unsigned int baud)
{
SCON = 0x50; //配置串口为模式1
TMOD &= 0x0F; //清零T1的控制位
TMOD |= 0x20; //配置T1为模式2
TH1 = 256 - (11059200/12/32)/baud; //计算T1重载值
TL1 = TH1; //初值等于重载值
ET1 = 0; //禁止T1中断
ES = 1; //使能串口中断
TR1 = 1; //启动T1
}
void InterruptUART() interrupt 4
{
if(RI)
{
RI = 0;
SBUF = SBUF + 1;
}
if(TI)
{
TI = 0;
}
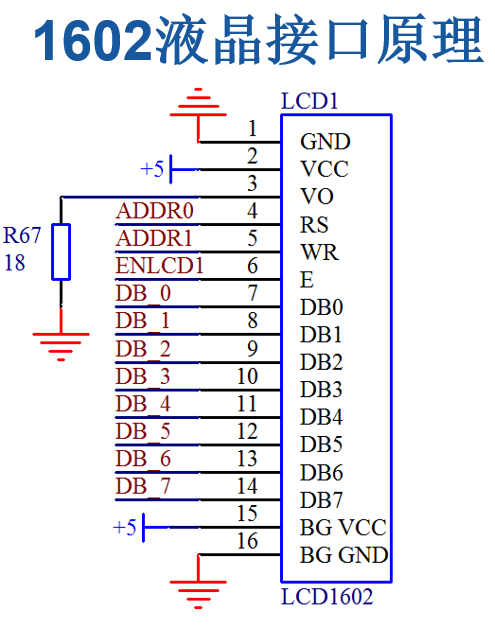
}1602液晶
1602液晶的认识

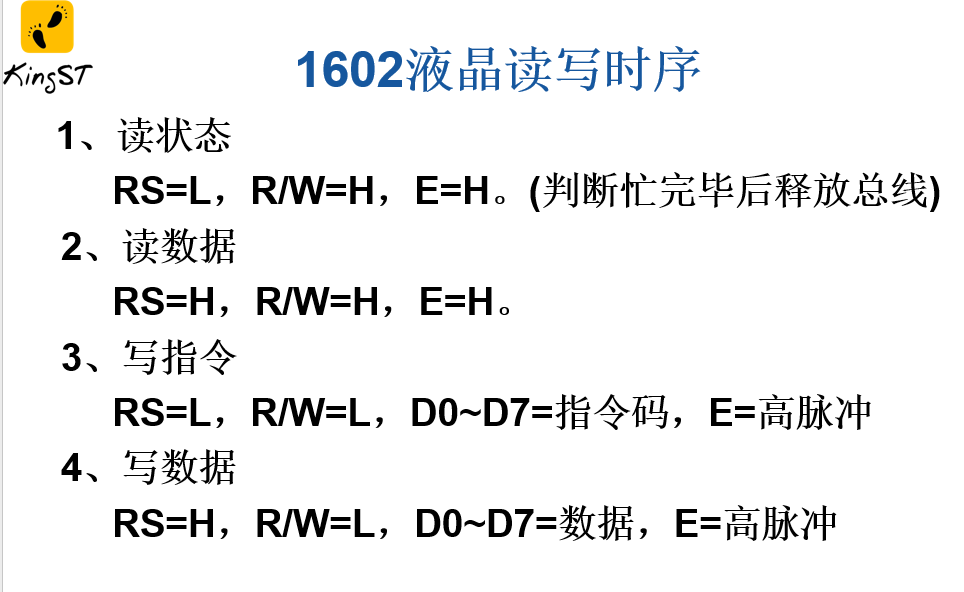
1602液晶读写时序
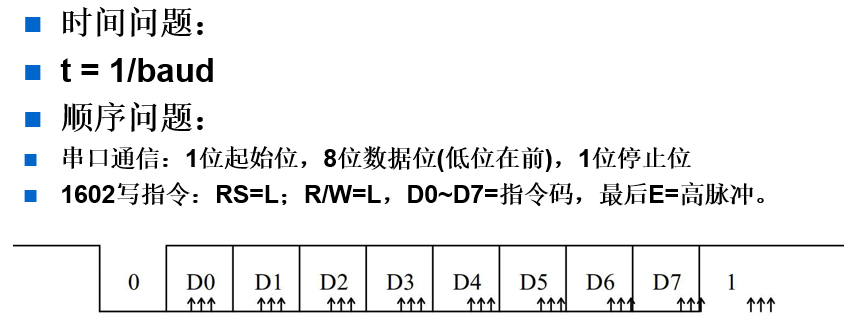
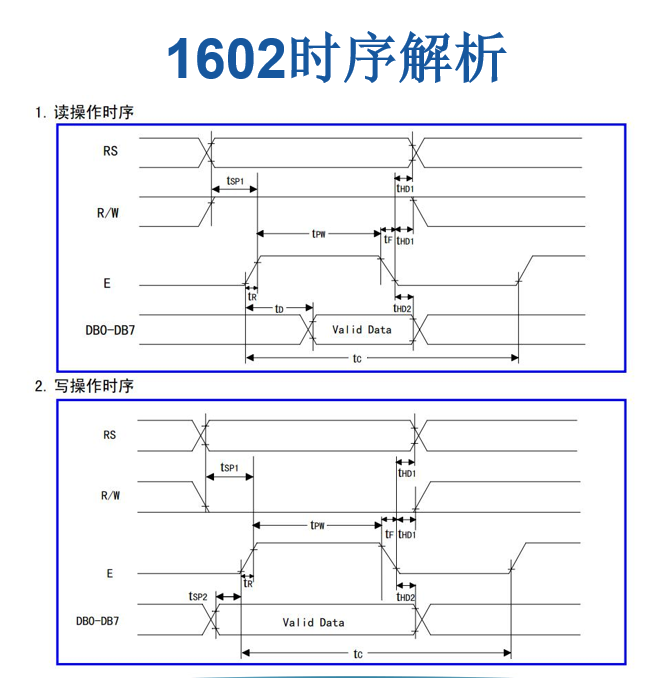
通信时序解析

I2C总线与EEPROM
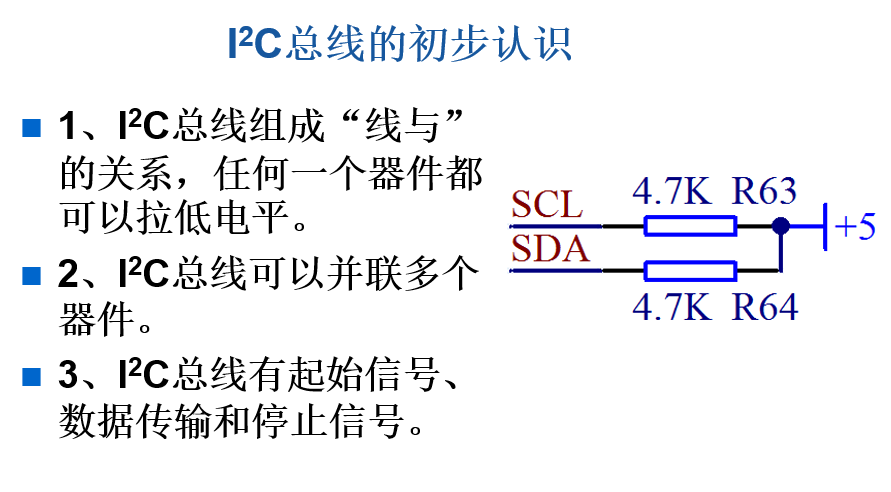
I2C总线(协议)
- I^2^C(Inter-Integrated Circuit)总线是一种由PHILIPS公司开发的两线式串行总线,用于连接微控制器及其外围设备( 特别是外部存储器件)。
- UART通信只需要一条线即可完成,I2C总线是由数据线SDA和时钟SCL构成的串行总线,可发送和接收数据。
- 从应用上来讲 ,UART通信多用于板间通信,I2C通信多用于板内通信。
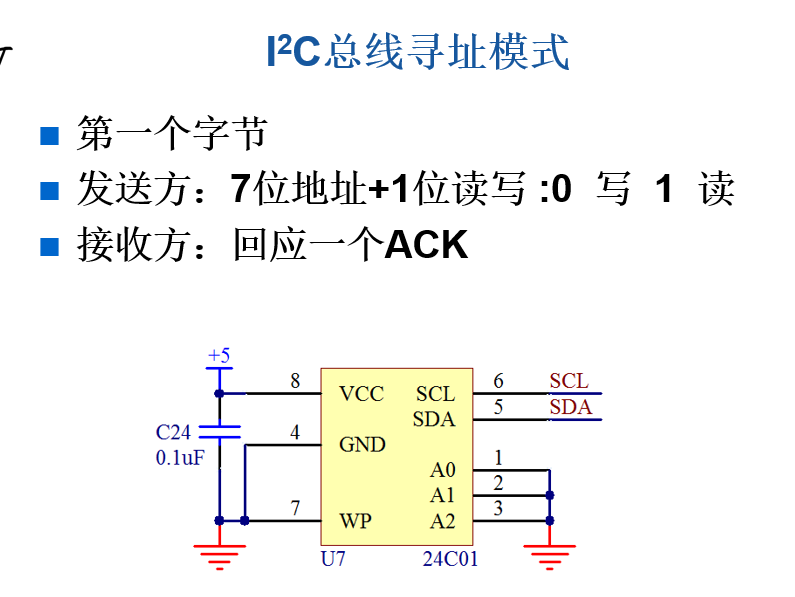
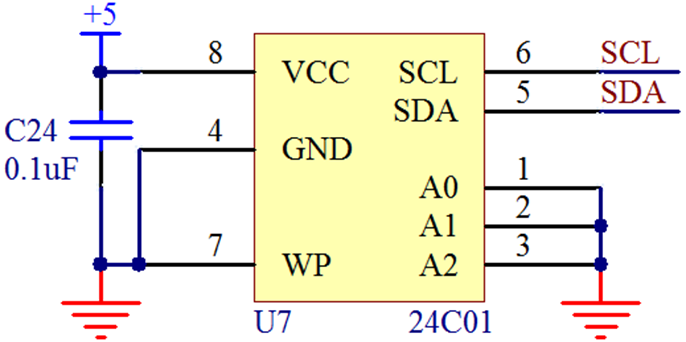
EEPROM(器件)
- 24Cxx 存储量xxk bit 24C02即 256字节
- 可重复擦写30w到100w次
- 数据可保存100年
EEPROM写数据流程
EEPROM写数据流程
第一步:首先是I2C的起始信号,接着跟上首字节,即EEPROM的地址和读写位的组合,读写方向上选择“写”操作。第二步:发送要写入数据的EEPROM内部存储地址。
第三步:发送要存储的数据第一个字节、第二个字节... ...。
1. 写数据(单片机发送)过程中,每个字节结束后EEPROM都会回应一个“应答位0”,告诉我们写EEPROM成功,如果没有应答表示未成功。
2. 写数据过程中,每成功写入一个字节,EEPROM地址自动加1,当加到最大值,会溢出。
EEPROM读数据流程
第一步:首先是I2C的起始信号,接着跟上首字节,即EEPROM的地址和读写位的组合,读写方向上选择“写”操作。第二步:发送要读取的EEPROM内部存储地址。
第三步:重新发送I2C的起始信号和器件地址,并且在方向位选择“读”操作。
**在这三步中,每一个字节实际上都是在“写”,因此EEPROM都会回应一个“应答位0”。**
第四步:读取从器件发回的数据,每读一个字节,如果还想继续读下一个字节,就发送一个“应答位0”,如果不想继续读了,就发送一个“非应答位1”。
应答位: ACK 非应答位:NACK
实时时钟DS1302
BCD码的概念
BCD码的概念
1. BCD码(Binary-Coded Decimal)即二-十进制代码2. 0 ~ 9 : 0b0000 ~ 0b1001
3. 主要应用:时间、日期、年月在单片机系统中的存储、显示等。
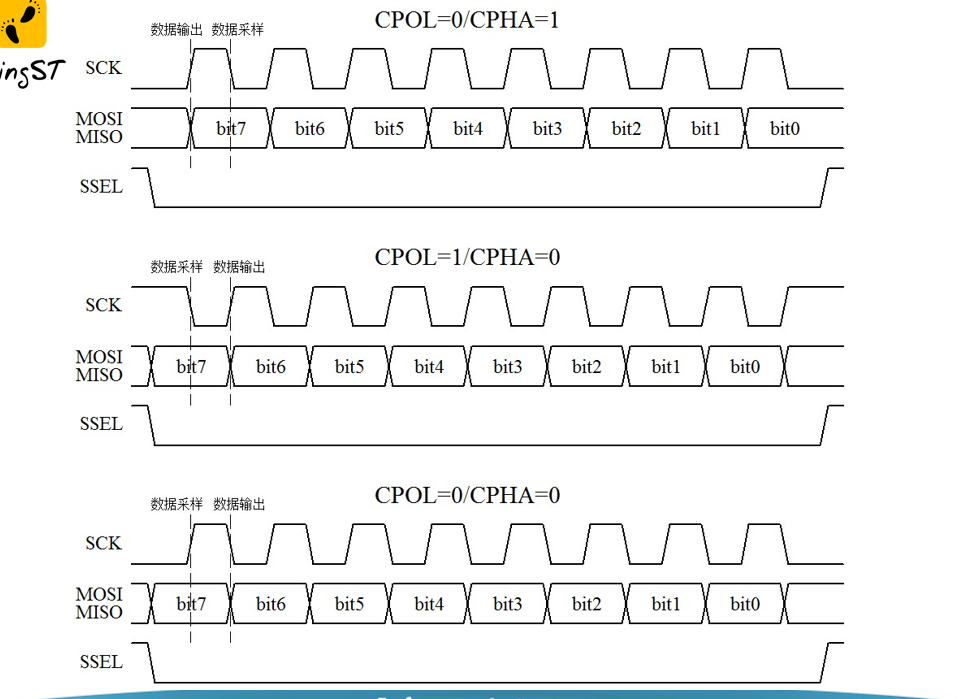
SPI时序的初步认识
SPI时序的初步认识1
SPI :Serial Peripheral Interface 是一种高速的、全双工、同步通信总线。应用:单片机和EEPROM、实时时钟、数字信号处理器
- SSEL:片选,也写做SCS,从设备片选使能信号。
- SCLK:时钟,也写作SCK,由主机产生,和SCL类似
- MOSI:主机输出从机输入,Master Output/Slave Input,主机给从机发送指令或者数据的通道。
- MISO:主机输入从机输出,Master Input/Slave Output,主机读取从机的状态或者数据的通道
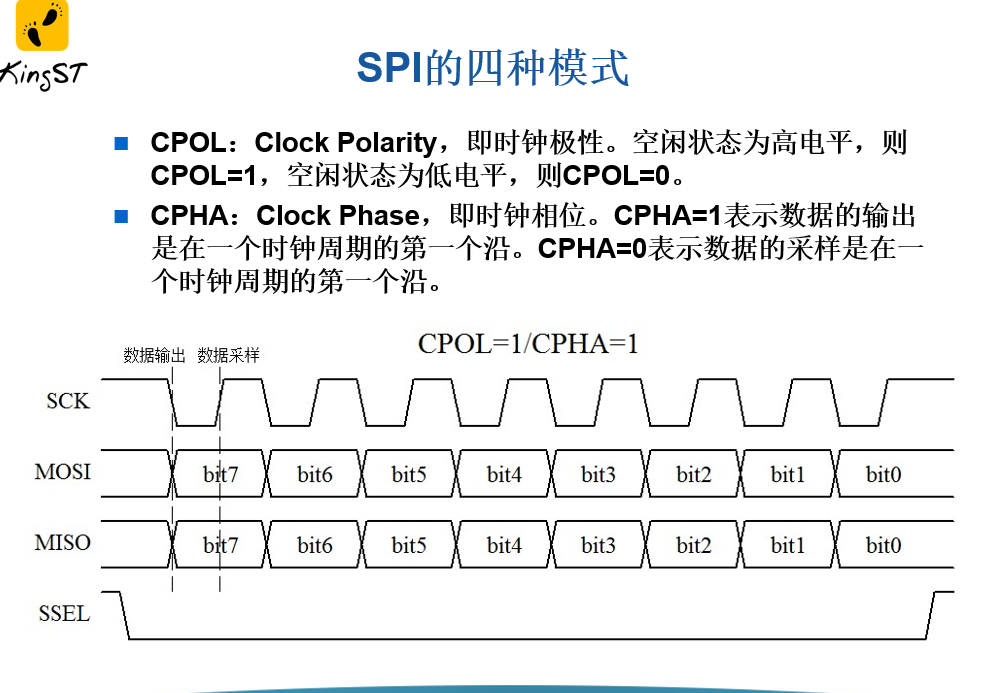
SPI的四种模式
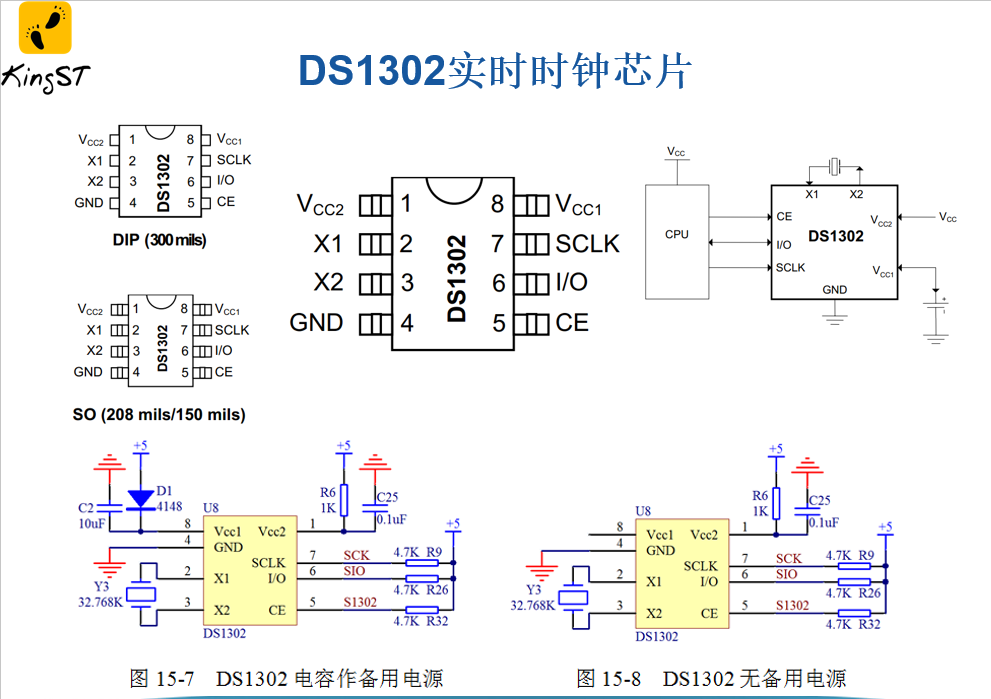
实时时钟芯片DS1302
实时时钟芯片DS1302
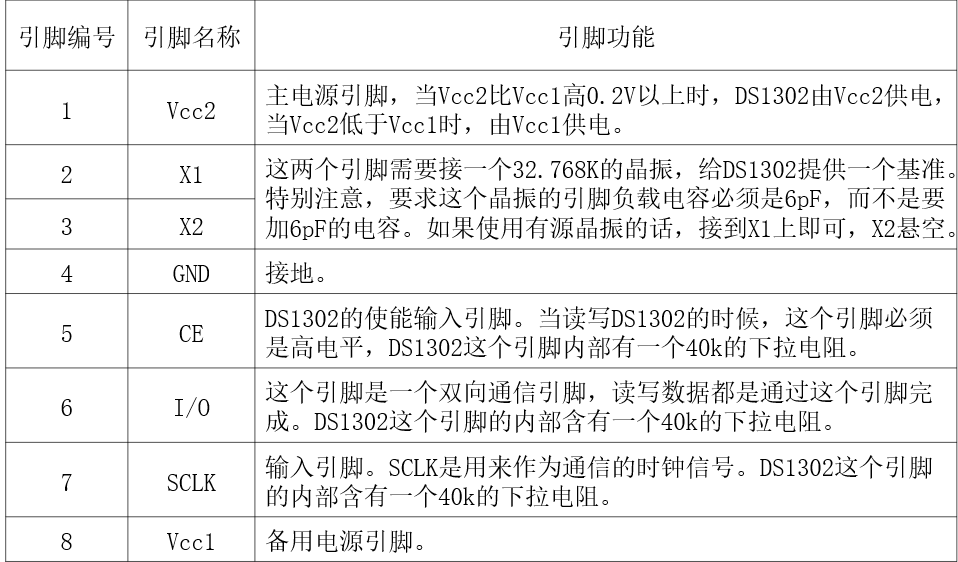
DS1302是一个实时时钟芯片,可以提供秒、分、小时、日期、月、年等信息,并且还有软件自动调整的能力,可以通过配置AM/PM来决定采用24小时格式还是12小时格式。
拥有31字节数据存储RAM。
串行I/O通信方式,相对并行来说比较节省IO口的使用。
DS1302的工作电压比较宽,在2.0~5.5V的范围内都可以正常工作。
DS1302这种时钟芯片功耗一般都很低,它在工作电压2.0V的时候,工作电流小于300nA。
DS1302共有8个引脚,有两种封装形式,一种是DIP-8封装,芯片宽度(不含引脚)是300mil,一种是SOP-8封装,有两种宽度,一种是150mil,一种是208mil。
当供电电压是5V的时候,兼容标准的TTL电平标准,这里的意思是,可以完美的和单片机进行通信。
由于DS1302是DS1202的升级版本,所以所有的功能都兼容DS1202。此外DS1302有两个电源输入,一个是主电源,另外一个是备用电源,比如可以用电池或者大电容,这样做是为了在系统掉电的情况下,我们的时钟还会继续走。
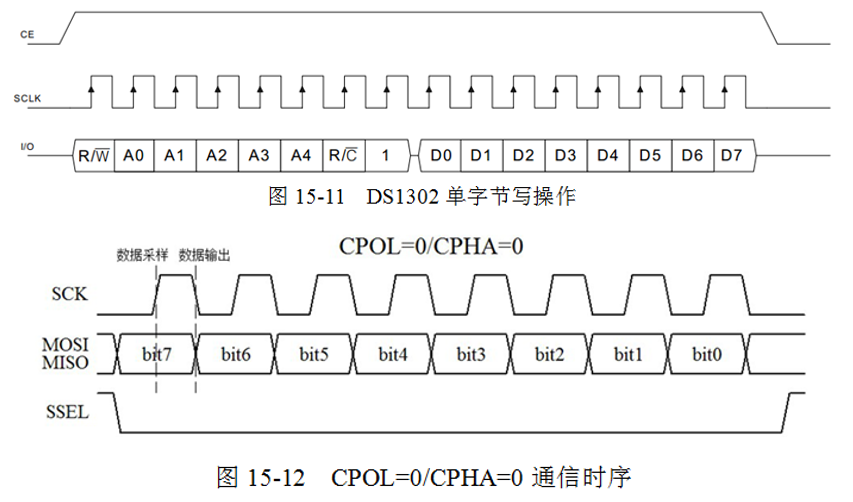
DS1302寄存器介绍
DS1302寄存器介绍
DS1302单字节写操作时序
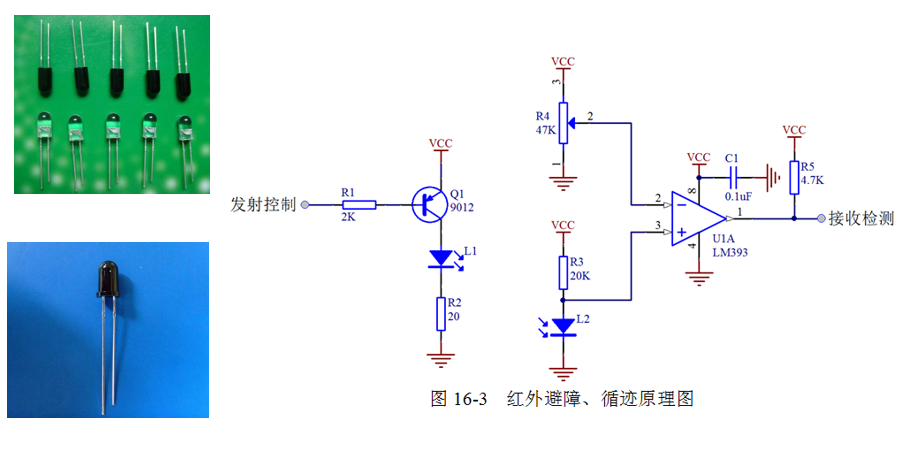
红外通信
红外发射管和接收管
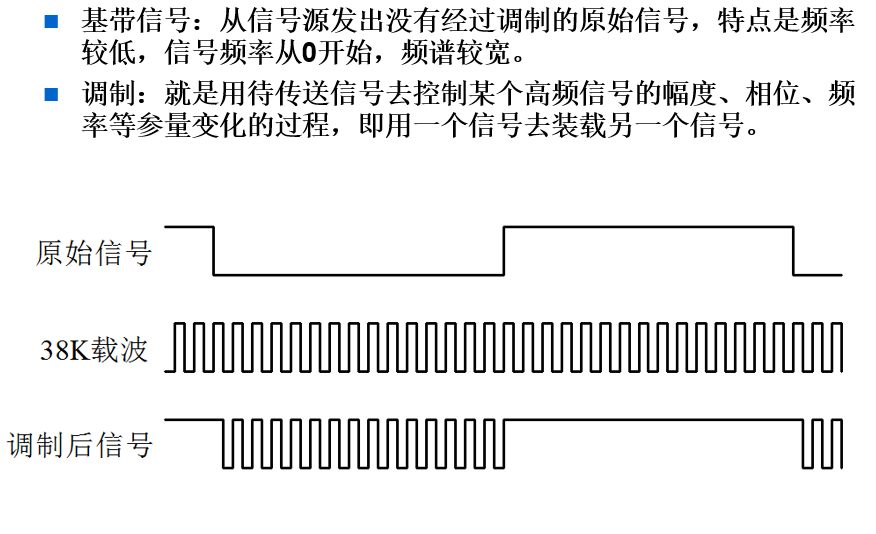
信号调制原理
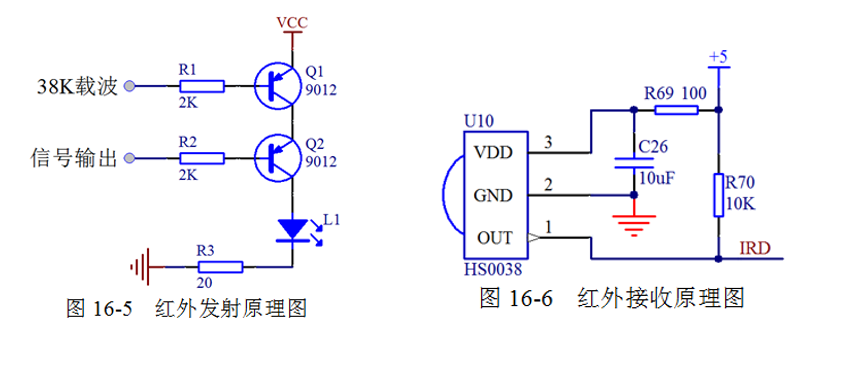
红外遥控发送接收原理图
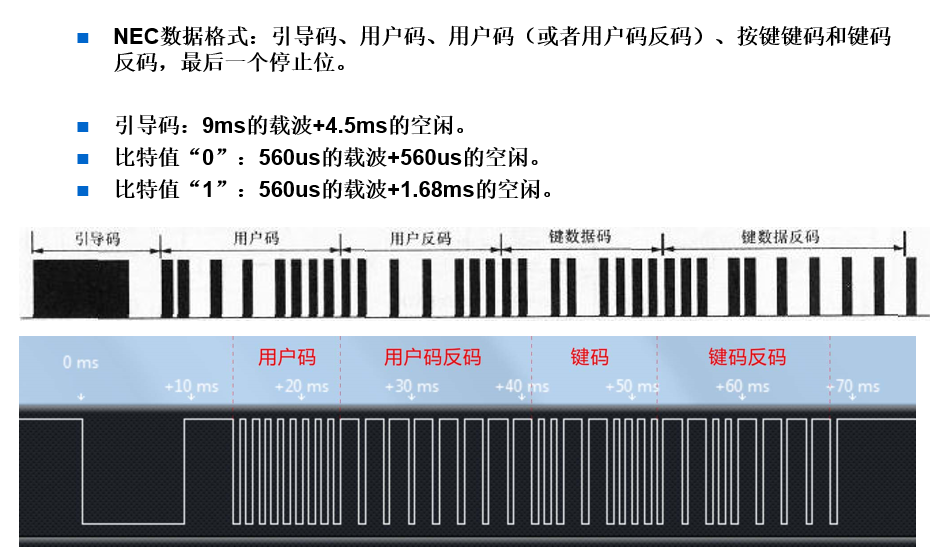
NEC协议红外遥控器
DS1302红外通信
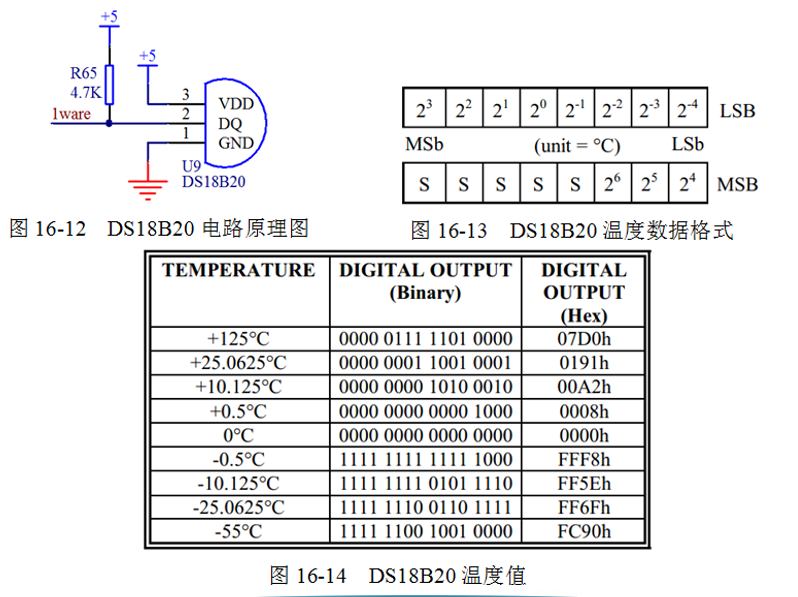
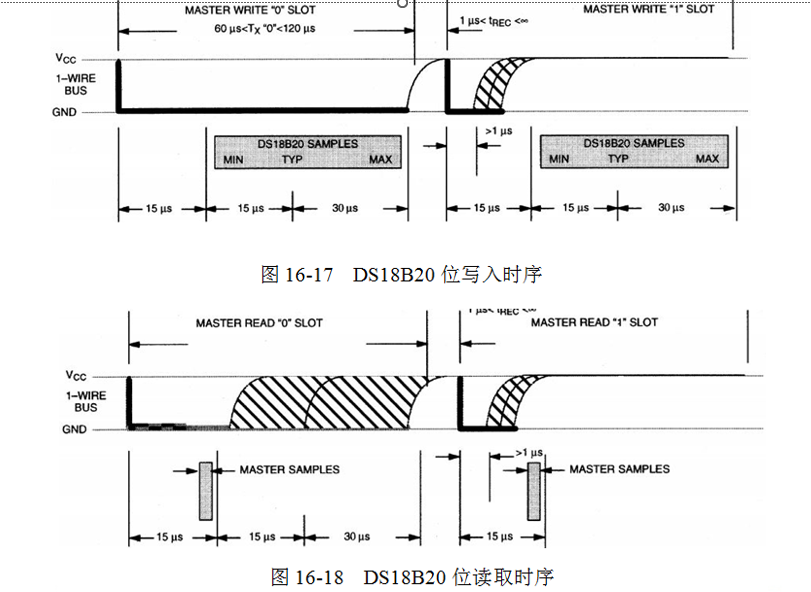
DS18B20温度传感器
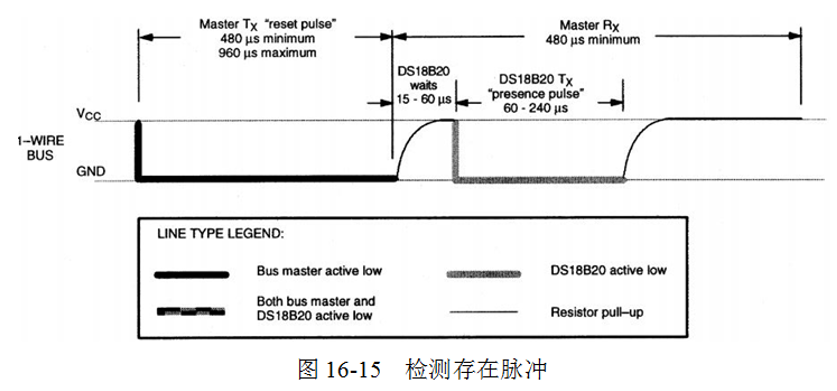
初始化
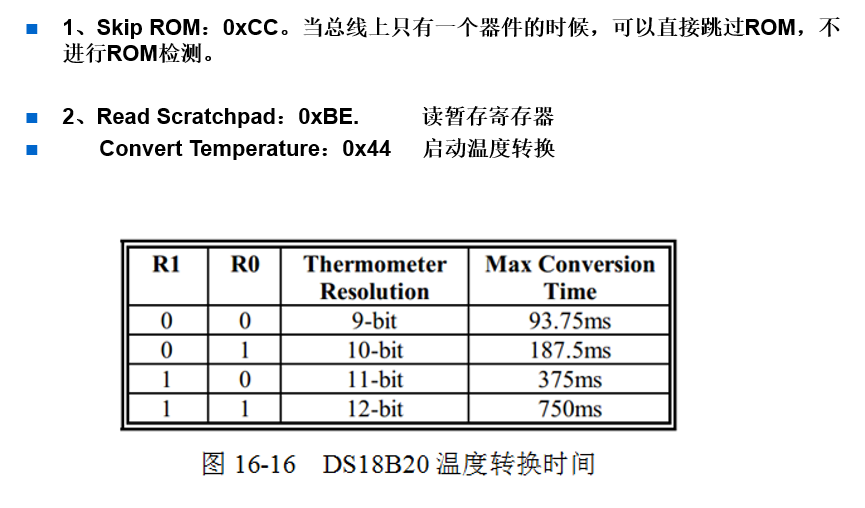
DS18B20操作指令
DS18B20的位读写时序
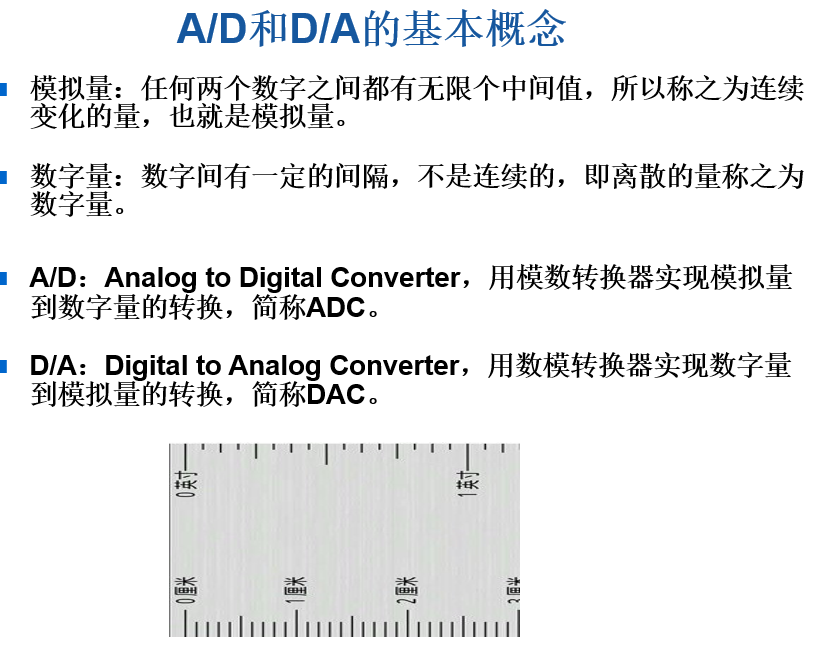
模数转换A/D与数模转换D/A
A/D和D/A的基本概念
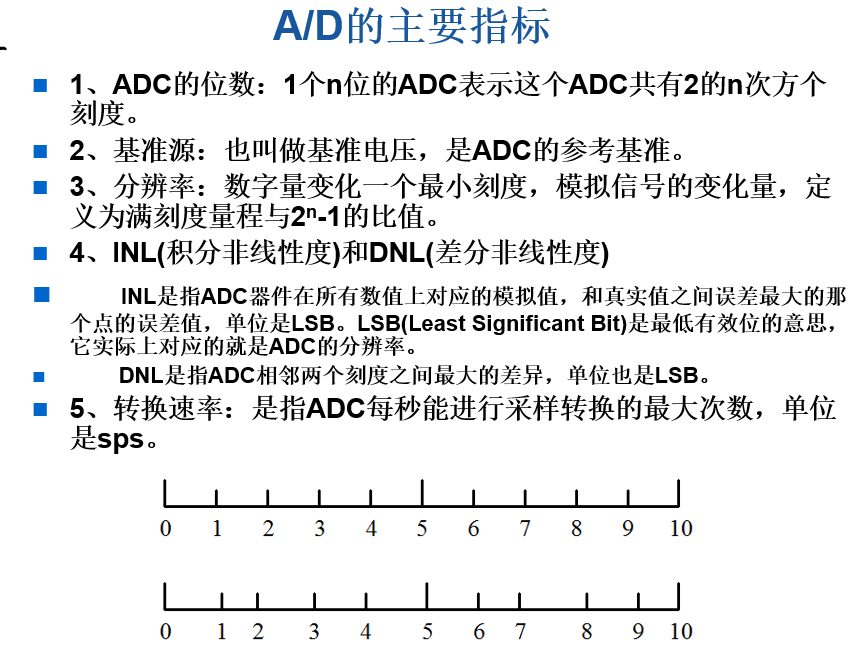
A/D的主要指标
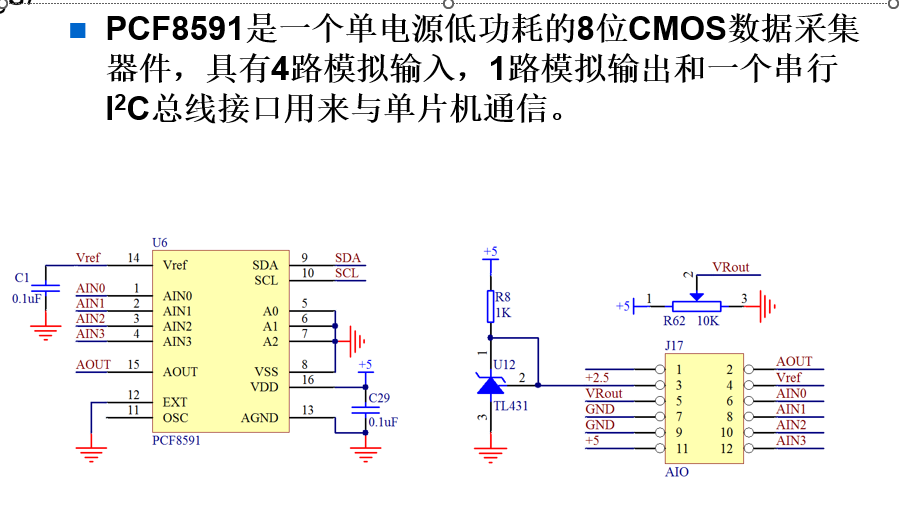
PCF8591的硬件接口
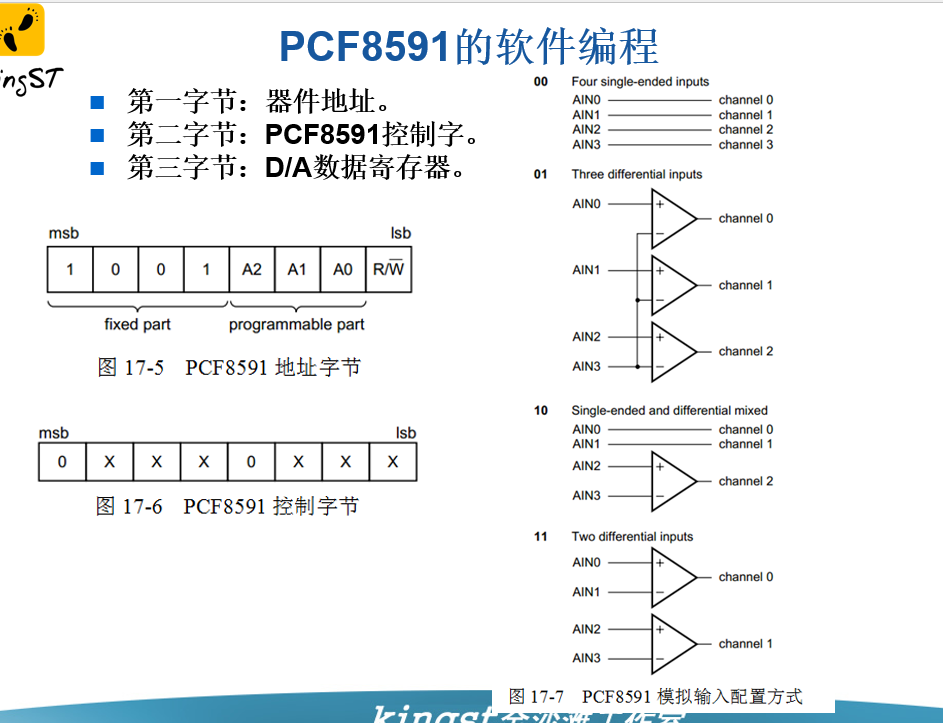
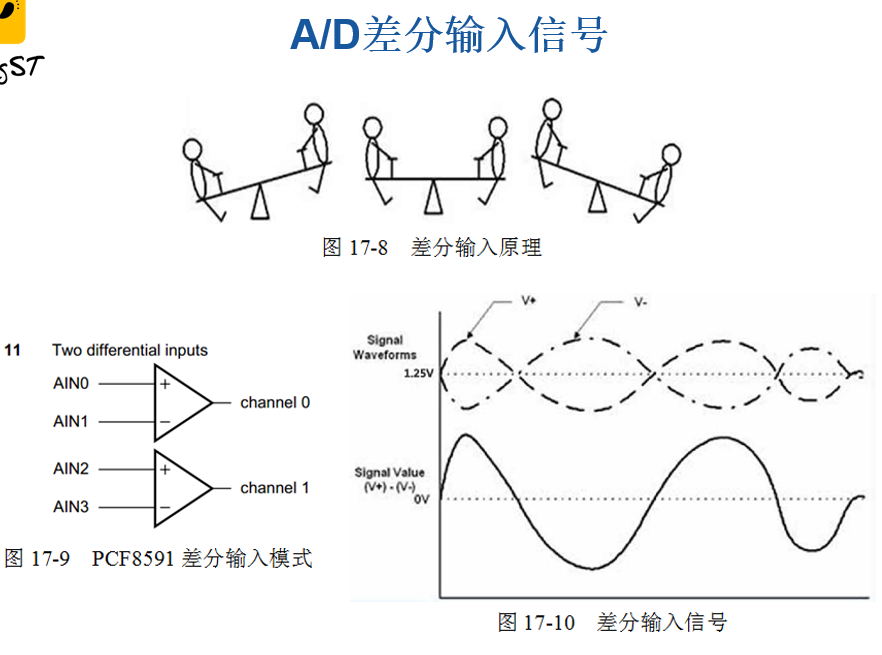
A/D差分输入信号
RS485通信与Modbus协议
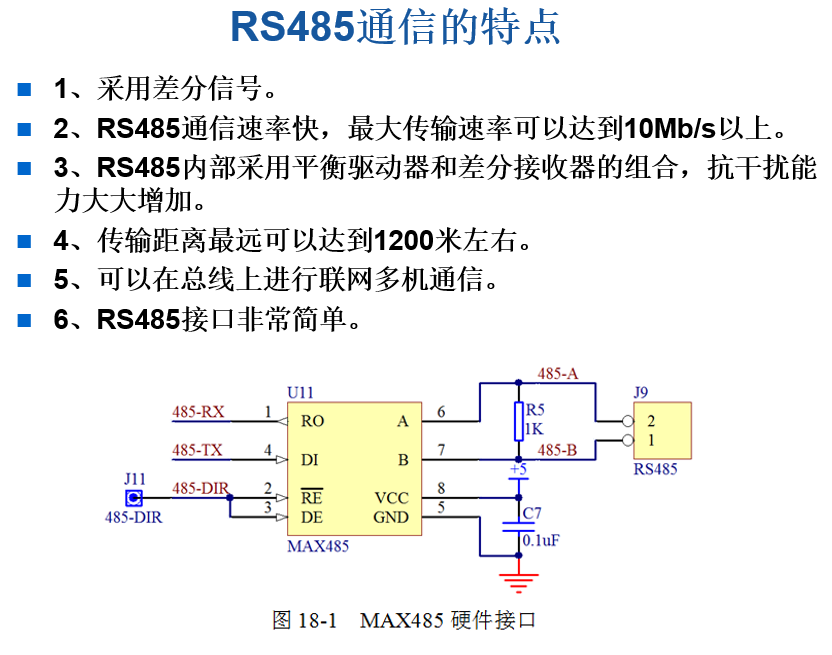
RS485通信的特点
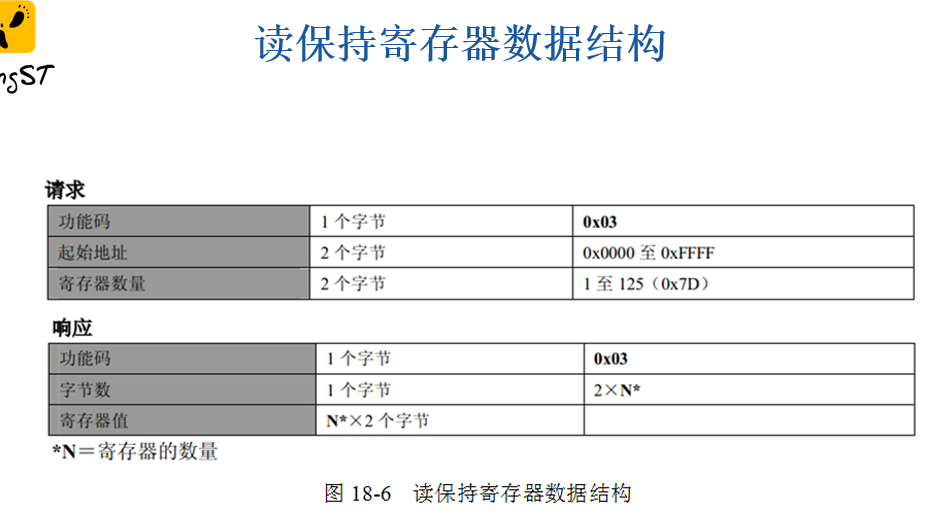
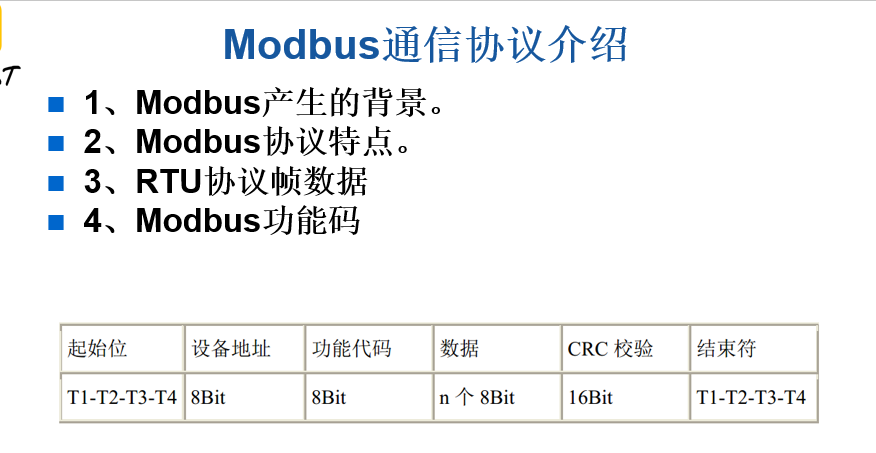
Modbus通信协议介绍
读保持寄存器数据结构